图像分割技术原理解析
- 图像分割
- 模型
- 全卷积网络(FCN)
- UNet
- 显著性目标检测/图像分割 U2net
- SegNet
- 现在的图像分割技术常用
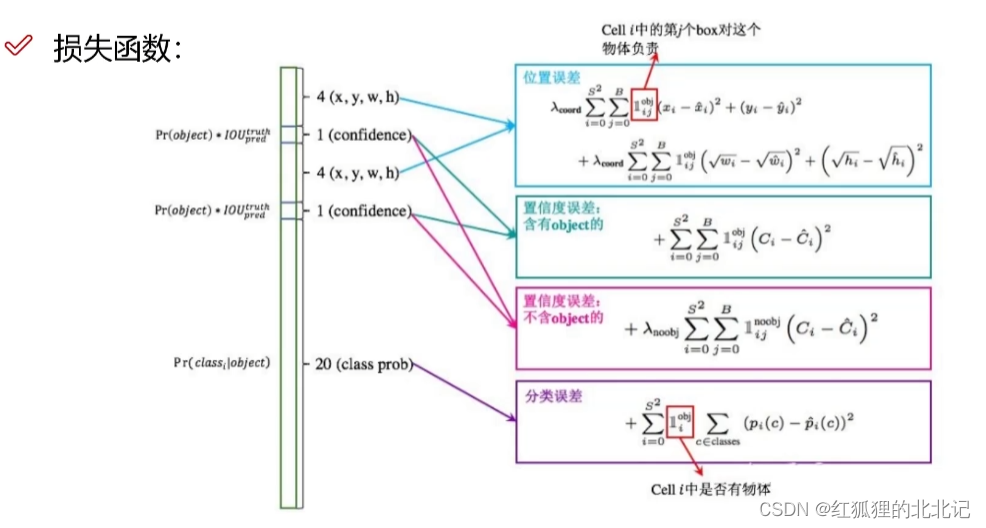
- 常用损失函数
- 损失函数
- 精度描述
- 像素准确率(Pixel Accuracy)
- 平均像素准确率(Mean Pixel Accuracy)
- 平均交并比(Mean IoU)
- 频权交并比(FWIoU)
- Dice系数(Dice Coeffcient)
图像分割
模型
- 早期基于深度学习的图像分割以FCN为核心,旨在重点解决如何更好从卷积下采样中恢复丢掉的信息损失。
后来逐渐形成了以U-Net为核心的这样一种编解码对称的U形结构。 - 语义分割界迄今为止最重要的两个设计,一个是以U-Net为代表的U形结构,目前基于U-Net结构的创新就层出不穷,比如说应用于3D图像的V-Net,嵌套U-Net结构的U-Net++等。除此在外还有SegNet、RefineNet、HRNet和FastFCN。另一个则是以DeepLab系列为代表的Dilation设计,主要包括DeepLab系列和PSPNet。随着模型的Baseline效果不断提升,语义分割任务的主要矛盾也逐从downsample损失恢复像素逐渐演变为如何更有效地利用context上下文信息。
全卷积网络(FCN)
FCN(Fully Convilutional Networks)是语义分割领域的开山之作。FCN的提出是在2016年,相较于此前提出的AlexNet和VGG等卷积全连接的网络结构,FCN提出用卷积层代替全连接层来处理语义分割问题,这也是FCN的由来,即全卷积网络。FCN的关键点主要有三,一是全卷积进行特征提取和下采样,二是双线性插值进行上采样,三是跳跃连接进行特征融合。

import torch
import torch.nn as nn
import torch.nn.init as init
import torch.nn.functional as F
from torch.utils import model_zoo
from torchvision import models
class FCN8(nn.Module):def __init__(self, num_classes): super().__init__()self.feats = nn.Sequential(*feats[0:9]) self.feat3 = nn.Sequential(*feats[10:16]) self.feat4 = nn.Sequential(*feats[17:23]) self.feat5 = nn.Sequential(*feats[24:30])for m in self.modules(): if isinstance(m, nn.Conv2d): m.requires_grad = Falseself.fconn = nn.Sequential(nn.Conv2d(512, 4096, 7),nn.ReLU(inplace=True),nn.Dropout(),nn.Conv2d(4096, 4096, 1),nn.ReLU(inplace=True),nn.Dropout()) self.score_feat3 = nn.Conv2d(256, num_classes, 1)self.score_feat4 = nn.Conv2d(512, num_classes, 1) self.score_fconn = nn.Conv2d(4096, num_classes, 1)def forward(self, x): feats = self.feats(x) feat3 = self.feat3(feats) feat4 = self.feat4(feat3) feat5 = self.feat5(feat4) fconn = self.fconn(feat5) score_feat3 = self.score_feat3(feat3) score_feat4 = self.score_feat4(feat4) score_fconn = self.score_fconn(fconn) score = F.upsample_bilinear(score_fconn, score_feat4.size()[2:]) score += score_feat4 score = F.upsample_bilinear(score, score_feat3.size()[2:]) score += score_feat3 return F.upsample_bilinear(score, x.size()[2:])
- vgg16作为FCN-8的编码部分,这使得FCN-8具备较强的特征提取能力。
UNet
- 早期基于深度学习的图像分割以FCN为核心,旨在重点解决如何更好从卷积下采样中恢复丢掉的信息损失。后来逐渐形成了以UNet为核心的这样一种编解码对称的U形结构。UNet结构能够在分割界具有一统之势,最根本的还是其效果好,尤其是在医学图像领域。所以,做医学影像相关的深度学习应用时,一定都用过UNet,而且最原始的UNet一般都会有一个不错的baseline表现。2015年发表UNet的MICCAI,是目前医学图像分析领域最顶级的国际会议,UNet为什么在医学上效果这么好非常值得探讨一番。U-Net结构如下图所示:

乍一看很复杂,U形结构下貌似有很多细节问题。我们来把UNet简化一下,如下图所示:

从图中可以看到,简化之后的UNet的关键点只有三条线: - 下采样编码
- 上采样解码
- 跳跃连接
下采样进行信息浓缩和上采样进行像素恢复
UNet进行了4次的最大池化下采样,每一次采样后都使用了卷积进行信息提取得到特征图,然后再经过4次上采样恢复输入像素尺寸。
但UNet最关键的、也是最特色的部分在于图中红色虚线的Skip Connection。
特点:每一次下采样都会有一个跳跃连接与对应的上采样进行级联,这种不同尺度的特征融合对上采样恢复像素大有帮助,具体来说就是高层(浅层)下采样倍数小,特征图具备更加细致的图特征,底层(深层)下采样倍数大,信息经过大量浓缩,空间损失大,但有助于目标区域(分类)判断,当high level和low level的特征进行融合时,分割效果往往会非常好。
import torch
from torch.nn import functional as Fclass CNNLayer(torch.nn.Module):def __init__(self, C_in, C_out):'''卷积层:param C_in::param C_out:'''super(CNNLayer, self).__init__()self.layer = torch.nn.Sequential(torch.nn.Conv2d(C_in, C_out, kernel_size=(3,3), stride=(1,1), padding=(1,1)),torch.nn.BatchNorm2d(C_out),torch.nn.Dropout(0.3),torch.nn.LeakyReLU(),torch.nn.Conv2d(C_out, C_out, kernel_size=(3,3), stride=(1,1), padding=(1,1)),torch.nn.BatchNorm2d(C_out),torch.nn.Dropout(0.4),torch.nn.LeakyReLU())def forward(self, x):return self.layer(x)class DownSampling(torch.nn.Module):def __init__(self, C):'''下采样:param C:'''super(DownSampling, self).__init__()self.layer = torch.nn.Sequential(torch.nn.Conv2d(C, C,kernel_size=(3,3), stride=(2,2), padding=(1,1)),torch.nn.LeakyReLU())def forward(self, x):return self.layer(x)class UpSampling(torch.nn.Module):def __init__(self, C):'''上采样:param C:'''super(UpSampling, self).__init__()self.C = torch.nn.Conv2d(C, C // 2, kernel_size=(1,1), stride=(1,1))def forward(self, x, r):up = F.interpolate(x, scale_factor=2, mode='nearest')x = self.C(up)return torch.cat((x, r), 1)class Unet(torch.nn.Module):def __init__(self):super(Unet, self).__init__()self.C1 = CNNLayer(3, 64)self.D1 = DownSampling(64)self.C2 = CNNLayer(64, 128)self.D2 = DownSampling(128)self.C3 = CNNLayer(128, 256)self.D3 = DownSampling(256)self.C4 = CNNLayer(256, 512)self.D4 = DownSampling(512)self.C5 = CNNLayer(512, 1024)self.U1 = UpSampling(1024)self.C6 = CNNLayer(1024, 512)self.U2 = UpSampling(512)self.C7 = CNNLayer(512, 256)self.U3 = UpSampling(256)self.C8 = CNNLayer(256, 128)self.U4 = UpSampling(128)self.C9 = CNNLayer(128, 64)self.pre = torch.nn.Conv2d(64, 3, kernel_size=(3,3), stride=(1,1), padding=(1,1))self.sigmoid = torch.nn.Sigmoid()def forward(self, x):'''U型结构:param x::return:'''R1 = self.C1(x)R2 = self.C2(self.D1(R1))R3 = self.C3(self.D2(R2))R4 = self.C4(self.D3(R3))Y1 = self.C5(self.D4(R4))O1 = self.C6(self.U1(Y1, R4))O2 = self.C7(self.U2(O1, R3))O3 = self.C8(self.U3(O2, R2))O4 = self.C9(self.U4(O3, R1))return self.sigmoid(self.pre(O4))if __name__ == '__main__':a = torch.randn(2, 3, 256, 256) #.cuda()net = Unet() #.cuda()print(net(a).shape)显著性目标检测/图像分割 U2net
- 更强的连接
- 套娃无止境
- 每一层其实都可以作为一个单层模型进行训练计算
- 训练速度快,精度高。建议使用


- pytorch实现代码如下:
import torch
import torch.nn as nn
import torch.nn.functional as Fclass REBNCONV(nn.Module):def __init__(self, in_ch=3, out_ch=3, dirate=1):super(REBNCONV, self).__init__()self.conv_s1 = nn.Conv2d(in_ch, out_ch, kernel_size=(3, 3), padding=(1 * dirate, 1 * dirate),dilation=(1 * dirate, 1 * dirate))self.bn_s1 = nn.BatchNorm2d(out_ch)self.relu_s1 = nn.ReLU(inplace=True)def forward(self, x):hx = xxout = self.relu_s1(self.bn_s1(self.conv_s1(hx)))return xout## upsample tensor 'src' to have the same spatial size with tensor 'tar'
def _upsample_like(src, tar):''':param src::param tar::return:'''src = F.interpolate(src, size=tar.shape[2:], mode='bilinear', align_corners=True)return src### RSU-7 ###
class RSU7(nn.Module): # UNet07DRES(nn.Module):def __init__(self, in_ch=3, mid_ch=12, out_ch=3):super(RSU7, self).__init__()self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool5 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv6 = REBNCONV(mid_ch, mid_ch, dirate=1)self.rebnconv7 = REBNCONV(mid_ch, mid_ch, dirate=2)self.rebnconv6d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv5d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)def forward(self, x):hx = xhxin = self.rebnconvin(hx)hx1 = self.rebnconv1(hxin)hx = self.pool1(hx1)hx2 = self.rebnconv2(hx)hx = self.pool2(hx2)hx3 = self.rebnconv3(hx)hx = self.pool3(hx3)hx4 = self.rebnconv4(hx)hx = self.pool4(hx4)hx5 = self.rebnconv5(hx)hx = self.pool5(hx5)hx6 = self.rebnconv6(hx)hx7 = self.rebnconv7(hx6)hx6d = self.rebnconv6d(torch.cat((hx7, hx6), 1))hx6dup = _upsample_like(hx6d, hx5)hx5d = self.rebnconv5d(torch.cat((hx6dup, hx5), 1))hx5dup = _upsample_like(hx5d, hx4)hx4d = self.rebnconv4d(torch.cat((hx5dup, hx4), 1))hx4dup = _upsample_like(hx4d, hx3)hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))hx3dup = _upsample_like(hx3d, hx2)hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))hx2dup = _upsample_like(hx2d, hx1)hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))return hx1d + hxin### RSU-6 ###
class RSU6(nn.Module): # UNet06DRES(nn.Module):def __init__(self, in_ch=3, mid_ch=12, out_ch=3):super(RSU6, self).__init__()self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool4 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=1)self.rebnconv6 = REBNCONV(mid_ch, mid_ch, dirate=2)self.rebnconv5d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)def forward(self, x):hx = xhxin = self.rebnconvin(hx)hx1 = self.rebnconv1(hxin)hx = self.pool1(hx1)hx2 = self.rebnconv2(hx)hx = self.pool2(hx2)hx3 = self.rebnconv3(hx)hx = self.pool3(hx3)hx4 = self.rebnconv4(hx)hx = self.pool4(hx4)hx5 = self.rebnconv5(hx)hx6 = self.rebnconv6(hx5)hx5d = self.rebnconv5d(torch.cat((hx6, hx5), 1))hx5dup = _upsample_like(hx5d, hx4)hx4d = self.rebnconv4d(torch.cat((hx5dup, hx4), 1))hx4dup = _upsample_like(hx4d, hx3)hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))hx3dup = _upsample_like(hx3d, hx2)hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))hx2dup = _upsample_like(hx2d, hx1)hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))return hx1d + hxin### RSU-5 ###
class RSU5(nn.Module): # UNet05DRES(nn.Module):def __init__(self, in_ch=3, mid_ch=12, out_ch=3):super(RSU5, self).__init__()self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool3 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=1)self.rebnconv5 = REBNCONV(mid_ch, mid_ch, dirate=2)self.rebnconv4d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)def forward(self, x):hx = xhxin = self.rebnconvin(hx)hx1 = self.rebnconv1(hxin)hx = self.pool1(hx1)hx2 = self.rebnconv2(hx)hx = self.pool2(hx2)hx3 = self.rebnconv3(hx)hx = self.pool3(hx3)hx4 = self.rebnconv4(hx)hx5 = self.rebnconv5(hx4)hx4d = self.rebnconv4d(torch.cat((hx5, hx4), 1))hx4dup = _upsample_like(hx4d, hx3)hx3d = self.rebnconv3d(torch.cat((hx4dup, hx3), 1))hx3dup = _upsample_like(hx3d, hx2)hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))hx2dup = _upsample_like(hx2d, hx1)hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))return hx1d + hxin### RSU-4 ###
class RSU4(nn.Module): # UNet04DRES(nn.Module):def __init__(self, in_ch=3, mid_ch=12, out_ch=3):super(RSU4, self).__init__()self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)self.pool1 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=1)self.pool2 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=1)self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=2)self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=1)self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)def forward(self, x):hx = xhxin = self.rebnconvin(hx)hx1 = self.rebnconv1(hxin)hx = self.pool1(hx1)hx2 = self.rebnconv2(hx)hx = self.pool2(hx2)hx3 = self.rebnconv3(hx)hx4 = self.rebnconv4(hx3)hx3d = self.rebnconv3d(torch.cat((hx4, hx3), 1))hx3dup = _upsample_like(hx3d, hx2)hx2d = self.rebnconv2d(torch.cat((hx3dup, hx2), 1))hx2dup = _upsample_like(hx2d, hx1)hx1d = self.rebnconv1d(torch.cat((hx2dup, hx1), 1))return hx1d + hxin### RSU-4F ###
class RSU4F(nn.Module): # UNet04FRES(nn.Module):def __init__(self, in_ch=3, mid_ch=12, out_ch=3):super(RSU4F, self).__init__()self.rebnconvin = REBNCONV(in_ch, out_ch, dirate=1)self.rebnconv1 = REBNCONV(out_ch, mid_ch, dirate=1)self.rebnconv2 = REBNCONV(mid_ch, mid_ch, dirate=2)self.rebnconv3 = REBNCONV(mid_ch, mid_ch, dirate=4)self.rebnconv4 = REBNCONV(mid_ch, mid_ch, dirate=8)self.rebnconv3d = REBNCONV(mid_ch * 2, mid_ch, dirate=4)self.rebnconv2d = REBNCONV(mid_ch * 2, mid_ch, dirate=2)self.rebnconv1d = REBNCONV(mid_ch * 2, out_ch, dirate=1)def forward(self, x):hx = xhxin = self.rebnconvin(hx)hx1 = self.rebnconv1(hxin)hx2 = self.rebnconv2(hx1)hx3 = self.rebnconv3(hx2)hx4 = self.rebnconv4(hx3)hx3d = self.rebnconv3d(torch.cat((hx4, hx3), 1))hx2d = self.rebnconv2d(torch.cat((hx3d, hx2), 1))hx1d = self.rebnconv1d(torch.cat((hx2d, hx1), 1))return hx1d + hxin##### U^2-Net ####
class U2NET(nn.Module):def __init__(self, in_ch=3, out_ch=1):super(U2NET, self).__init__()self.stage1 = RSU7(in_ch, 32, 64)self.pool12 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.stage2 = RSU6(64, 32, 128)self.pool23 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.stage3 = RSU5(128, 64, 256)self.pool34 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.stage4 = RSU4(256, 128, 512)self.pool45 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.stage5 = RSU4F(512, 256, 512)self.pool56 = nn.MaxPool2d(2, stride=2, ceil_mode=True)self.stage6 = RSU4F(512, 256, 512)# decoderself.stage5d = RSU4F(1024, 256, 512)self.stage4d = RSU4(1024, 128, 256)self.stage3d = RSU5(512, 64, 128)self.stage2d = RSU6(256, 32, 64)self.stage1d = RSU7(128, 16, 64)self.side1 = nn.Conv2d(64, out_ch, kernel_size=(3, 3), padding=(1, 1))self.side2 = nn.Conv2d(64, out_ch, kernel_size=(3, 3), padding=(1, 1))self.side3 = nn.Conv2d(128, out_ch, kernel_size=(3, 3), padding=(1, 1))self.side4 = nn.Conv2d(256, out_ch, kernel_size=(3, 3), padding=(1, 1))self.side5 = nn.Conv2d(512, out_ch, kernel_size=(3, 3), padding=(1, 1))self.side6 = nn.Conv2d(512, out_ch, kernel_size=(3, 3), padding=(1, 1))self.outconv = nn.Conv2d(6, out_ch, kernel_size=(1, 1))def forward(self, x):hx = x# stage 1hx1 = self.stage1(hx)hx = self.pool12(hx1)# stage 2hx2 = self.stage2(hx)hx = self.pool23(hx2)# stage 3hx3 = self.stage3(hx)hx = self.pool34(hx3)# stage 4hx4 = self.stage4(hx)hx = self.pool45(hx4)# stage 5hx5 = self.stage5(hx)hx = self.pool56(hx5)# stage 6hx6 = self.stage6(hx)hx6up = _upsample_like(hx6, hx5)# -------------------- decoder --------------------hx5d = self.stage5d(torch.cat((hx6up, hx5), 1))hx5dup = _upsample_like(hx5d, hx4)hx4d = self.stage4d(torch.cat((hx5dup, hx4), 1))hx4dup = _upsample_like(hx4d, hx3)hx3d = self.stage3d(torch.cat((hx4dup, hx3), 1))hx3dup = _upsample_like(hx3d, hx2)hx2d = self.stage2d(torch.cat((hx3dup, hx2), 1))hx2dup = _upsample_like(hx2d, hx1)hx1d = self.stage1d(torch.cat((hx2dup, hx1), 1))# side outputd1 = self.side1(hx1d)d2 = self.side2(hx2d)d2 = _upsample_like(d2, d1)d3 = self.side3(hx3d)d3 = _upsample_like(d3, d1)d4 = self.side4(hx4d)d4 = _upsample_like(d4, d1)d5 = self.side5(hx5d)d5 = _upsample_like(d5, d1)d6 = self.side6(hx6)d6 = _upsample_like(d6, d1)d0 = self.outconv(torch.cat((d1, d2, d3, d4, d5, d6), 1))return torch.sigmoid(d0), torch.sigmoid(d1), torch.sigmoid(d2), torch.sigmoid(d3), torch.sigmoid(d4), torch.sigmoid(d5), torch.sigmoid(d6)### U^2-Net small ###
class U2NETP(nn.Module):def __init__(self, in_ch=3, out_ch=1):super(U2NETP, self).__init__()# 左一self.stage1 = RSU7(in_ch, 16, 64)self.pool12 = nn.MaxPool2d(2, stride=2, ceil_mode=True)# 左2self.stage2 = RSU6(64, 16, 64)self.pool23 = nn.MaxPool2d(2, stride=2, ceil_mode=True)# 左3self.stage3 = RSU5(64, 16, 64)self.pool34 = nn.MaxPool2d(2, stride=2, ceil_mode=True)# 左4self.stage4 = RSU4(64, 16, 64)self.pool45 = nn.MaxPool2d(2, stride=2, ceil_mode=True)# 左5self.stage5 = RSU4F(64, 16, 64)self.pool56 = nn.MaxPool2d(2, stride=2, ceil_mode=True)# 左6self.stage6 = RSU4F(64, 16, 64)# decoderself.stage5d = RSU4F(128, 16, 64)self.stage4d = RSU4(128, 16, 64)self.stage3d = RSU5(128, 16, 64)self.stage2d = RSU6(128, 16, 64)self.stage1d = RSU7(128, 16, 64)self.side1 = nn.Conv2d(64, out_ch, (3, 3), padding=(1, 1))self.side2 = nn.Conv2d(64, out_ch, (3, 3), padding=(1, 1))self.side3 = nn.Conv2d(64, out_ch, (3, 3), padding=(1, 1))self.side4 = nn.Conv2d(64, out_ch, (3, 3), padding=(1, 1))self.side5 = nn.Conv2d(64, out_ch, (3, 3), padding=(1, 1))self.side6 = nn.Conv2d(64, out_ch, (3, 3), padding=(1, 1))self.outconv = nn.Conv2d(6, out_ch, kernel_size=(1, 1))def forward(self, x):hx = x# stage 1hx1 = self.stage1(hx)hx = self.pool12(hx1)# stage 2hx2 = self.stage2(hx)hx = self.pool23(hx2)# stage 3hx3 = self.stage3(hx)hx = self.pool34(hx3)# stage 4hx4 = self.stage4(hx)hx = self.pool45(hx4)# stage 5hx5 = self.stage5(hx)hx = self.pool56(hx5)# stage 6hx6 = self.stage6(hx)hx6up = _upsample_like(hx6, hx5)# decoderhx5d = self.stage5d(torch.cat((hx6up, hx5), 1))hx5dup = _upsample_like(hx5d, hx4)hx4d = self.stage4d(torch.cat((hx5dup, hx4), 1))hx4dup = _upsample_like(hx4d, hx3)hx3d = self.stage3d(torch.cat((hx4dup, hx3), 1))hx3dup = _upsample_like(hx3d, hx2)hx2d = self.stage2d(torch.cat((hx3dup, hx2), 1))hx2dup = _upsample_like(hx2d, hx1)hx1d = self.stage1d(torch.cat((hx2dup, hx1), 1))# side outputd1 = self.side1(hx1d)d2 = self.side2(hx2d)d2 = _upsample_like(d2, d1)d3 = self.side3(hx3d)d3 = _upsample_like(d3, d1)d4 = self.side4(hx4d)d4 = _upsample_like(d4, d1)d5 = self.side5(hx5d)d5 = _upsample_like(d5, d1)d6 = self.side6(hx6)d6 = _upsample_like(d6, d1)d0 = self.outconv(torch.cat((d1, d2, d3, d4, d5, d6), 1))return torch.sigmoid(d0), torch.sigmoid(d1), torch.sigmoid(d2), torch.sigmoid(d3), torch.sigmoid(d4), torch.sigmoid(d5), torch.sigmoid(d6)if __name__ == '__main__':model = U2NET(in_ch=3, out_ch=1)print(model)x = torch.randn(1, 3, 224, 224)print(model(x)[0].shape)SegNet
SegNet网络是典型的编码-解码结构。SegNet编码器网络由VGG16的前13个卷积层构成,所以通常是使用VGG16的预训练权重来进行初始化。每个编码器层都有一个对应的解码器层,因此解码器层也有13层。编码器最后的输出输入到softmax分类器中,输出每个像素的类别概率。SegNet如下图所示。

…实现太简单,不写了,以后写吧
其实还有deeplab系列,也后面补充
现在的图像分割技术常用
- 空洞卷积
- 通过更改空洞数量大小进而来获取到更大的感受野,感受到全局区域内的图像特征变化
- 编解码
- encoder - decoder
- 主要是Unet开始之后,现在都使用的是编解码模式进行图像分割
- encoder - decoder
- skip-connection
- 跳跃连接
- 防止梯度弥散或者梯度爆炸
- 补充尺度信息中缺少的以前的高频部分
- 跳跃连接
常用损失函数
损失函数
常用的分类损失均可用作语义分割的损失函数。
最常用的就是交叉熵损失函数,
- 如果只是前景分割,则可以使用二分类的交叉熵损失(Binary CrossEntropy Loss, BCE loss)
- 对于目标物体较小的情况我们可以使用Dice损失
- 对于目标物体类别不均衡的情况可以使用加权的交叉熵损失(Weighted CrossEntropy Loss, WCE Loss)。
精度描述
语义分割作为经典的图像分割问题,其本质上还是一种图像像素分类。
语义分割常见的评价指标包括
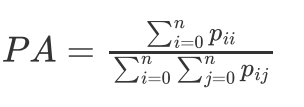
像素准确率(Pixel Accuracy)
像素准确率跟分类中的准确率含义一样,即所有分类正确的像素数占全部像素的比例。准确率 ,参考分类算法
PA的计算公式如下:
平均像素准确率(Mean Pixel Accuracy)
平均像素准确率(MPA)。
平均像素准确率其实更应该叫平均像素精确率,
是指分别计算每个类别分类正确的像素数占所有预测为该类别像素数比例的平均值。
所以,从定义上看,这是精确率(Precision)的定义,MPA的计算公式如下:

平均交并比(Mean IoU)
平均交并比(MIoU)。 交并比(Intersection over Union)的定义很简单,将标签图像和预测图像看成是两个集合,计算两个集合的交集和并集的比值。而平均交并比则是将所有类的IoU取平均。 MIoU的计算公式如下:

频权交并比(FWIoU)
- 针对数据集不均衡的情况下,特别关注某类或者某几类
频权交并比(FWIoU)。 频权交并比顾名思义,就是以每一类别的频率为权重和其IoU加权计算出来的结果。FWIoU的设计思想很明确,语义分割很多时候会面临图像中各目标类别不平衡的情况,对各类别IoU直接求平均不是很合理,所以考虑各类别的权重就非常重要了。FWIoU的计算公式如下:

Dice系数(Dice Coeffcient)
Dice系数。 Dice系数是一种度量两个集合相似性的函数,是语义分割中最常用的评价指标之一。Dice系数定义为两倍的交集除以像素和,跟IoU有点类似,其计算公式如下:
dice本质上跟分类指标中的F1-Score类似。作为最常用的分割指标之一,实现方式 如下:
import torch
def dice_coef(pred, target): """ Dice = (2*|X & Y|)/ (|X|+ |Y|) = 2*sum(|A*B|)/(sum(A^2)+sum(B^2)) """ smooth = 1. m1 = pred.reshape(-1).float() m2 = target.reshape(-1).float() intersection = (m1 * m2).sum().float() dice = (2. * intersection + smooth) / (torch.sum(m1*m1) + torch.sum(m2*m2) + smooth) return dice
参考:深度学习分割理论.