class RM65Control
{public:moveit::planning_interface::MoveGroupInterface moveGroup;RM65Control():moveGroup("arm"){}
}
moveit——将MoveGroupInterface写进自己的C++类中
news/2025/1/12 0:56:48/
相关文章
回归测试:优先级(Coverage 的适应度函数)
回归测试:优先级
介绍 在确定优先级时,我们的目标是为测试用例找到一个好的顺序。理想情况下,我们希望尽早发生任何故障。这可以加快整体开发过程,例如: 有时,一旦发现失败,我们就会停止测试。…

vue 3 第二十九章:路由管理(Vue Router4.x基础知识)
文章目录 1. Vue Router 的介绍2. Vue Router 的安装和使用2.1. 安装2.2. 使用 3. Vue Router 的路由配置和参数传递3.1. 路由配置3.2. 参数传递3.2.1. props3.2.2. query3.3. 访问路由参数 4. Vue Router 的动态路由和嵌套路由4.1. 动态路由4.2. 嵌套路由 5. 路由重定向6. Vue…
2320. 统计放置房子的方式数-动态规划
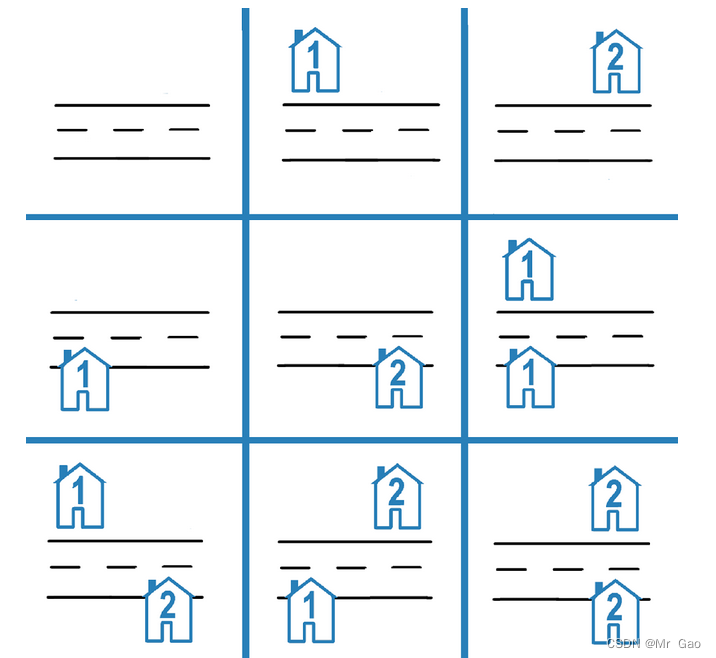
统计放置房子的方式数-动态规划
一条街道上共有 n * 2 个 地块 ,街道的两侧各有 n 个地块。每一边的地块都按从 1 到 n 编号。每个地块上都可以放置一所房子。
现要求街道同一侧不能存在两所房子相邻的情况,请你计算并返回放置房屋的方式数目。由于答案…
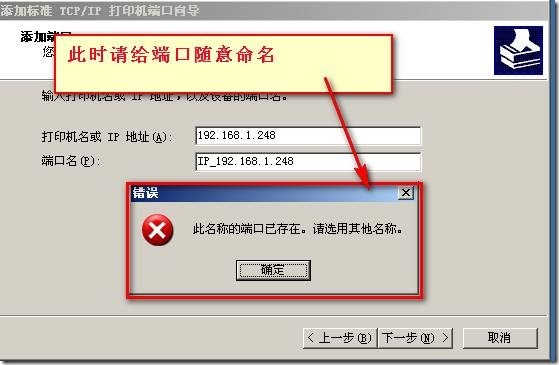
关于佳能IR2320N网络打印机的安装域使用
第一步:首先要为该机器设置一个IP地址,具体方法是:附加管理→系统管理→网络管理→IPv4→IP地址,输入相应的IP地址,子网掩码,默认网关。如果你要查看该机的MAC地址的话,那你也可以在此查看呢。选…

2320. 统计放置房子的方式数
思路:
第一想法用动规,但是不知道如何下手。浅看了一下答案,发现是做过的题。
易知:道路两排的房子摆列互不干扰,只需要保证每一侧的房子间隔排列即可。
所以,最终的结果为 dp[n]*dp[n]。
只需要对一侧…
洛谷P2320 [HNOI2006]鬼谷子的钱袋
https://www.luogu.org/problem/show?pid2320#sub 题目描述全是图 数学思维,分治思想 假设总数为n 从n/21到n的数都可以用1~n的数n/2表示出来 1~n/2的数也可以这样拆分成两份。 一路拆下去即可。 例如n12时: {1 2 3 4 5 6}6{7,8,9,10,11,12} {1,2,3}3{4…

Ardunio开发实例-AM2320温湿度传感器
AM2320温湿度传感器
温湿度组合传感器AM2320数字温湿度传感器是一种已校准的数字信号输出。 采用特殊的温度和湿度采集技术,确保产品具有很高的可靠性和出色的长期稳定性。 传感器由电容式湿度元件和集成的高精度温度测量设备组成,并与高性能微处理器连接。
AM2320使用一条…

HT66F2390/STM32——AM2320温湿度传感器
1、说明
AM2320 数字温湿度传感器采用单总线、标准 IC 两种通信方式。本文主要基于HT66F2390单片机,采用单总线通讯,实现AM2320传感器数据获取。关于AM2320传感器的使用,可参考AM2320产品手册。在文章最后,分享了AM2320的相关资料…