拒绝光照影响,一文教你在地平线旭日派X3上如何使用resnet18搭建自己的深度学习巡线小车
获取训练的代码请关注这个佬的文章,大佬,我这里只说怎么转模型,并且在旭日派X3部署
1. 在ubuntu虚拟机中将onnx模型转为bin模型
-
第一步将自己的resnet的onnx模型拖入虚拟机中
-
获取地平线官方的转换例程
选择分类中的resnet18
当前目录的结构就是这样的

- 修改01_check_X3.sh脚本
不过多解释,就按照我这个修改就行,具体可以到地平线社区查找
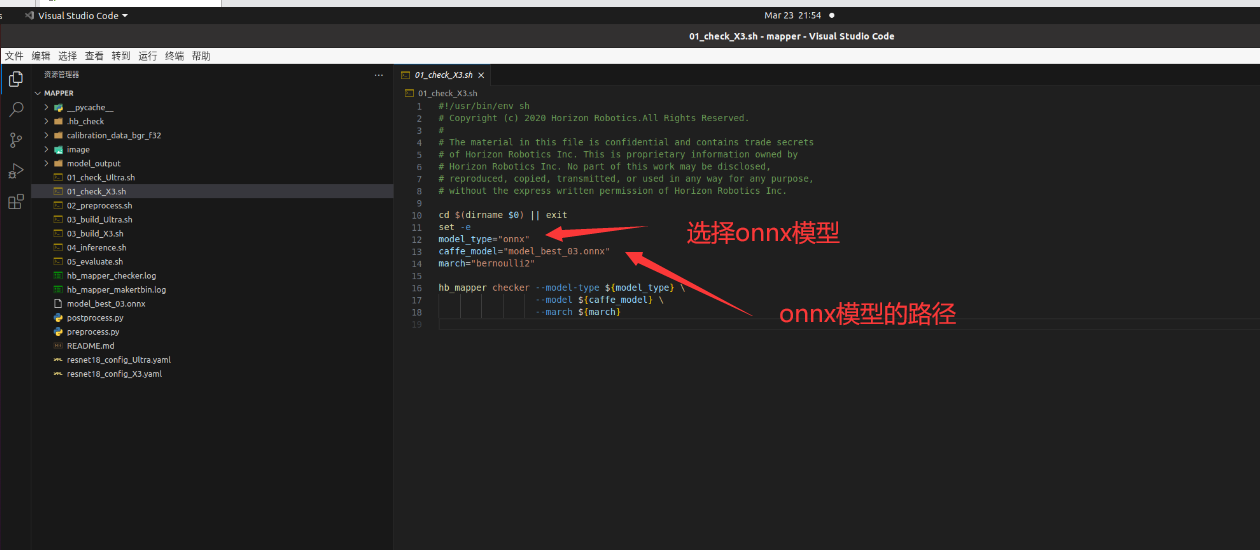
之后执行该脚本
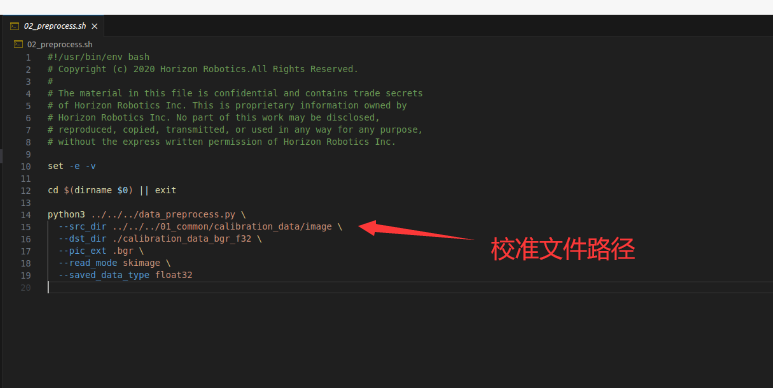
- 修改02_preprocess.sh,可以使用训练时的图片
- 修改resnet18_config_X3.yaml文件
修改模型的路径,以及转换后模型的名称,归一化的类型等
# Copyright (c) 2020 Horizon Robotics.All Rights Reserved.
#
# The material in this file is confidential and contains trade secrets
# of Horizon Robotics Inc. This is proprietary information owned by
# Horizon Robotics Inc. No part of this work may be disclosed,
# reproduced, copied, transmitted, or used in any way for any purpose,
# without the express written permission of Horizon Robotics Inc.# 模型转化相关的参数
# ------------------------------------
# model conversion related parameters
model_parameters:# Caffe浮点网络数据模型文件# ---------------------------------------------------------------------------------------------# the model file of floating-point Caffe neural network dataonnx_model: 'model_best_03.onnx'# Caffe网络描述文件# -----------------------------------------------------------------------------------------------# the file describes the structure of Caffe neural network# prototxt: '../../../01_common/model_zoo/mapper/classification/resnet18/resnet18_deploy.prototxt'# 适用BPU架构# ---------------------------------------------------------------------------------------# the applicable BPU architecturemarch: "bernoulli2"# 指定模型转换过程中是否输出各层的中间结果,如果为True,则输出所有层的中间输出结果,# ---------------------------------------------------------------------------------------# specifies whether or not to dump the intermediate results of all layers in conversion# if set to True, then the intermediate results of all layers shall be dumpedlayer_out_dump: False# 模型转换输出的结果的存放目录# ---------------------------------------------------------------------------------------# the directory in which model conversion results are storedworking_dir: 'model_output'# 模型转换输出的用于上板执行的模型文件的名称前缀# ---------------------------------------------------------------------------------------# model conversion generated name prefix of those model files used for dev board executionoutput_model_file_prefix: 'resnet18_224x224_nv12'# 模型输入相关参数, 若输入多个节点, 则应使用';'进行分隔, 使用默认缺省设置则写None
# -------------------------------------------------------------------------
# model input related parameters,
# please use ";" to seperate when inputting multiple nodes,
# please use None for default setting
input_parameters:# (选填) 模型输入的节点名称, 此名称应与模型文件中的名称一致, 否则会报错, 不填则会使用模型文件中的节点名称# -------------------------------------------------------------------------------------------------# (Optional) node name of model input,# it shall be the same as the name of model file, otherwise an error will be reported,# the node name of model file will be used when left blankinput_name: ""# 网络实际执行时,输入给网络的数据格式,包括 nv12/rgb/bgr/yuv444/gray/featuremap,# ------------------------------------------------------------------------------------------# the data formats to be passed into neural network when actually performing neural network# available options: nv12/rgb/bgr/yuv444/gray/featuremap,input_type_rt: 'nv12'# 网络实际执行时输入的数据排布, 可选值为 NHWC/NCHW# 若input_type_rt配置为nv12,则此处参数不需要配置# ------------------------------------------------------------------# the data layout formats to be passed into neural network when actually performing neural network, available options: NHWC/NCHW# If input_type_rt is configured as nv12, then this parameter does not need to be configuredinput_layout_rt: ''# 网络训练时输入的数据格式,可选的值为rgb/bgr/gray/featuremap/yuv444# ---------------------------------------------------------------------# the data formats in network training# available options: rgb/bgr/gray/featuremap/yuv444input_type_train: 'rgb'# 网络训练时输入的数据排布, 可选值为 NHWC/NCHW# ---------------------------------------------------------------------# the data layout in network training, available options: NHWC/NCHWinput_layout_train: 'NCHW'# (选填) 模型网络的输入大小, 以'x'分隔, 不填则会使用模型文件中的网络输入大小,否则会覆盖模型文件中输入大小# -------------------------------------------------------------------------------------------# (Optional)the input size of model network, seperated by 'x'# note that the network input size of model file will be used if left blank# otherwise it will overwrite the input size of model fileinput_shape: ''# 网络实际执行时,输入给网络的batch_size, 默认值为1# ---------------------------------------------------------------------# the data batch_size to be passed into neural network when actually performing neural network, default value: 1#input_batch: 1# 网络输入的预处理方法,主要有以下几种:# no_preprocess 不做任何操作# data_mean 减去通道均值mean_value# data_scale 对图像像素乘以data_scale系数# data_mean_and_scale 减去通道均值后再乘以scale系数# -------------------------------------------------------------------------------------------# preprocessing methods of network input, available options:# 'no_preprocess' indicates that no preprocess will be made # 'data_mean' indicates that to minus the channel mean, i.e. mean_value# 'data_scale' indicates that image pixels to multiply data_scale ratio# 'data_mean_and_scale' indicates that to multiply scale ratio after channel mean is minusednorm_type: 'data_mean_and_scale'# 图像减去的均值, 如果是通道均值,value之间必须用空格分隔# --------------------------------------------------------------------------# the mean value minused by image# note that values must be seperated by space if channel mean value is usedmean_value: '123.675 116.28 103.53'# 图像预处理缩放比例,如果是通道缩放比例,value之间必须用空格分隔# ---------------------------------------------------------------------------# scale value of image preprocess# note that values must be seperated by space if channel scale value is usedscale_value: '0.0171248 0.017507 0.0174292'# 模型量化相关参数
# -----------------------------
# model calibration parameters
calibration_parameters:# 模型量化的参考图像的存放目录,图片格式支持Jpeg、Bmp等格式,输入的图片# 应该是使用的典型场景,一般是从测试集中选择20~100张图片,另外输入# 的图片要覆盖典型场景,不要是偏僻场景,如过曝光、饱和、模糊、纯黑、纯白等图片# 若有多个输入节点, 则应使用';'进行分隔# -----------------------------------------------------------------------# the directory where reference images of model quantization are stored# image formats include JPEG, BMP etc.# should be classic application scenarios, usually 20~100 images are picked out from test datasets# in addition, note that input images should cover typical scenarios# and try to avoid those overexposed, oversaturated, vague, # pure blank or pure white images# use ';' to seperate when there are multiple input nodescal_data_dir: './calibration_data_bgr_f32'# 如果输入的图片文件尺寸和模型训练的尺寸不一致时,并且preprocess_on为true,# 则将采用默认预处理方法(skimage resize),# 将输入图片缩放或者裁减到指定尺寸,否则,需要用户提前把图片处理为训练时的尺寸# ----------------------------------------------------------------------------------# In case the size of input image file is different from that of in model training# and that preprocess_on is set to True,# shall the default preprocess method(skimage resize) be used# i.e., to resize or crop input image into specified size# otherwise user must keep image size as that of in training in advance# preprocess_on: False# 模型量化的算法类型,支持kl、max、default、load,通常采用default即可满足要求, 若为QAT导出的模型, 则应选择load# ------------------------------------------------------------------------------------# types of model quantization algorithms, usually default will meet the need# available options:kl, max, default and load# if converted model is quanti model exported from QAT , then choose `load`calibration_type: 'kl'# 编译器相关参数
# ----------------------------
# compiler related parameters
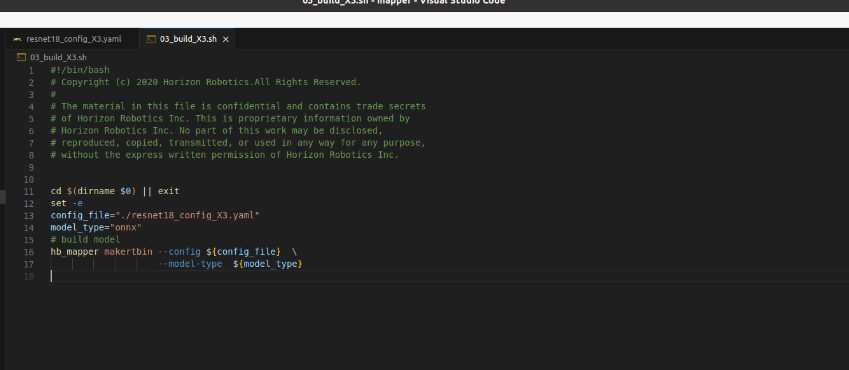
compiler_parameters:# 编译策略,支持bandwidth和latency两种优化模式;# bandwidth以优化ddr的访问带宽为目标;# latency以优化推理时间为目标# ------------------------------------------------------------------------------------------# compilation strategy, there are 2 available optimization modes: 'bandwidth' and 'lantency'# the 'bandwidth' mode aims to optimize ddr access bandwidth# while the 'lantency' mode aims to optimize inference durationcompile_mode: 'latency'# 设置debug为True将打开编译器的debug模式,能够输出性能仿真的相关信息,如帧率、DDR带宽占用等# -----------------------------------------------------------------------------------# the compiler's debug mode will be enabled by setting to True# this will dump performance simulation related information# such as: frame rate, DDR bandwidth usage etc.debug: False# 编译模型指定核数,不指定默认编译单核模型, 若编译双核模型,将下边注释打开即可# -------------------------------------------------------------------------------------# specifies number of cores to be used in model compilation # as default, single core is used as this value left blank# please delete the "# " below to enable dual-core mode when compiling dual-core model# core_num: 2# 优化等级可选范围为O0~O3# O0不做任何优化, 编译速度最快,优化程度最低,# O1-O3随着优化等级提高,预期编译后的模型的执行速度会更快,但是所需编译时间也会变长。# 推荐用O2做最快验证# ----------------------------------------------------------------------------# optimization level ranges between O0~O3# O0 indicates that no optimization will be made # the faster the compilation, the lower optimization level will be# O1-O3: as optimization levels increase gradually, model execution, after compilation, shall become faster# while compilation will be prolonged# it is recommended to use O2 for fastest verificationoptimize_level: 'O3'- 执行03_build_X3.sh
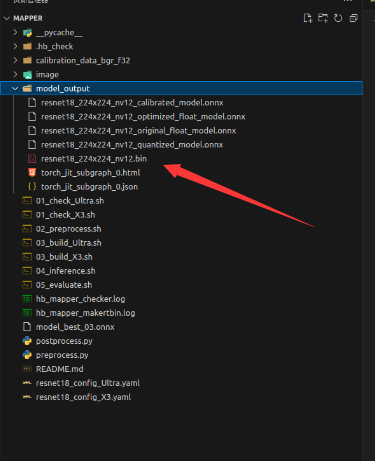
如果上面三个脚本都执行成功的话我们将会在当前model_output目录下找到bin文件,这就是可以在X3派上运行的模型文件
2. 在旭日派X3上部署该模型
import cv2
import numpy as np
from hobot_dnn import pyeasy_dnn as dnndef convert_bgr_to_nv12(cv_image):yuv_image = cv2.cvtColor(cv_image, cv2.COLOR_BGR2YUV)y_channel = yuv_image[:, :, 0]u_channel = yuv_image[::2, ::2, 1]v_channel = yuv_image[::2, ::2, 2]uv_channel = np.empty((u_channel.shape[0], u_channel.shape[1] * 2), dtype=u_channel.dtype)uv_channel[:, ::2] = u_channeluv_channel[:, 1::2] = v_channelnv12_image = np.concatenate((y_channel.flatten(), uv_channel.flatten()))return nv12_imagedef process_frame(cv_image, models, original_width, original_height):# 将图像缩放到模型期望的尺寸cv_image_resized = cv2.resize(cv_image, (224, 224), interpolation=cv2.INTER_LINEAR)nv12_image = convert_bgr_to_nv12(cv_image_resized)# 使用模型进行推理outputs = models[0].forward(np.frombuffer(nv12_image, dtype=np.uint8))outputs = outputs[0].buffer# 假设模型输出是在224x224图像上的比例坐标x_ratio, y_ratio = outputs[0][0][0][0], outputs[0][1][0][0]# 将比例坐标转换为原始视频帧的像素坐标x_pixel = int(x_ratio * original_width)y_pixel = int(y_ratio * original_height)return x_pixel, y_pixeldef main():models = dnn.load('/root/model/resnet18_224x224_nv12.bin')cap = cv2.VideoCapture("/root/model/03.avi")# 确定视频编解码器和创建VideoWriter对象fourcc = cv2.VideoWriter_fourcc(*'XVID')out = cv2.VideoWriter('output.avi', fourcc, 20.0, (640, 480))while cap.isOpened():ret, frame = cap.read()if not ret:breakx, y = process_frame(frame, models,640,480)cv2.circle(frame, (x, y), radius=5, color=(0, 0, 255), thickness=-1)# 写入帧到输出文件out.write(frame)# cv2.imshow('Frame', frame)if cv2.waitKey(1) & 0xFF == ord('q'):breakcap.release()out.release() # 释放VideoWriter对象cv2.destroyAllWindows()if __name__ == "__main__":main()这里使用了地平线提供的hobot_dnn库,注意需要将结果反归一化即x和y分别乘图像的宽和高
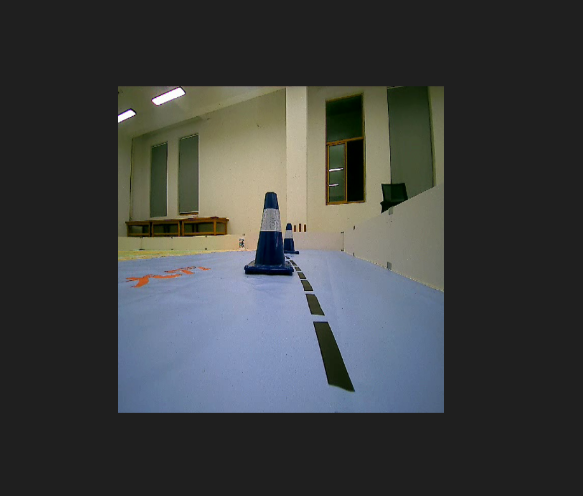
为了测试模型预测黑线的坐标是否准确,所以将模型输出的坐标在原来图像中绘制成原点,可以看到红点绘制在了黑线上说明预测成功,如果场景复杂建议数据集使用大量的不同场景的照片以达到最好的预测结果


我将预测结果的视频发到了b站,具体效果