1,简介
单总线(one-wire)是美国 DALLAS 公司推出的外围串行扩展总线技术,与 SPI、I2C 等串行数据通信方式不同,它采用单根信号线,既传输时钟又传输数据,而且数据传输是双向的。它具有节省 I/O口线资源、结构简单、成本低廉、便于总线扩展和维护等诸多优点。
单总线英文名 1-Wire,传输速率一般是 15.3Kbit/s,最大可达 142Kbit/s,通常采用 100Kbit/s 以下的速率传输数据。
2,硬件结构
单总线(one-wire)只有一根数据线,系统中的数据交换、控制都由这根线完成。设备(主机或从机)通过一个漏极开路或三态端口连至该数据线,以允许设备在不发送数据时能够释放总线,而让其它设备使用总线,其内部等效电路如图所示。

单总线通常要求外接一个约为4.7kΩ的上拉电阻,这样,当总线闲置时,其状态为高电平。主机和从机之间的通信可通过3个步骤完成,分别为初始化1-wire器件、识别1-wire器件和交换数据。由于它们是主从结构,只有主机呼叫从机时,从机才能应答,因此主机访问1-wire器件都必须严格遵循单总线命令序列,即初始化、ROM、命令功能命令。如果出现序列混乱,1-wire器件将不响应主机。
3,通信时序分析
由于DS18B20温度传感器在使用中与主机通讯是单总线(one-wire)通信,所以在这使用FPGA驱动DS18B20温度传感器测量温度来学习单总线(one-wire)。
3.1 FPGA 如何驱动 gxs18b20 并测量温度?
首先 FPGA 向温度传感器写入一些数据,数据按照一个字节一个字节发送,温度传感器接收到这些字节数据,会自动采集外界温度数据并保存在内部寄存器里面。然后 FPGA 向传感器写入读温 度数据指令,便可读取传感器里面的温度数据。
3.2 FPGA 与传感器通信过程
通过单总线访问 GX18B20 的执行序列如下:
步骤 1:初始化。
步骤 2:ROM 操作指令
步骤 3:GX18B20 功能指令。
每一次 GX18B20 的操作都必须满足以上步骤,若是缺少步骤或是顺序混乱,器件将不会有返回值。
3.2.1 初始化
通过单总线的所有执行操作都从一个初始化程序序列开始。初始化序列包含一个由总线控制器 发出的复位脉冲和其后由从机发出的存在脉冲。存在脉冲让总线控制器知道 Gx18B20 在总线上且 已经准备好操作。
所有和 Gx18B20 间的通信都以初始化序列开始,初始化序列如图所示。一个复位脉冲跟着一个存在脉冲表明Gx18B20 已经准备好发送和接收数据。 在初始化序列期间,总线控制器拉低总线并保持 480us 以发出(TX)一个复位脉冲信号,然后释放总线,进入接收状态(RX)。当总线被释放后,5kΩ的上拉电阻将总线拉到高电平。当 GX18B20 检测到 IO 引脚上的上升沿后,等待 15-60us,然后发出一个由 60-240us 低电平信号构成的存在脉冲。
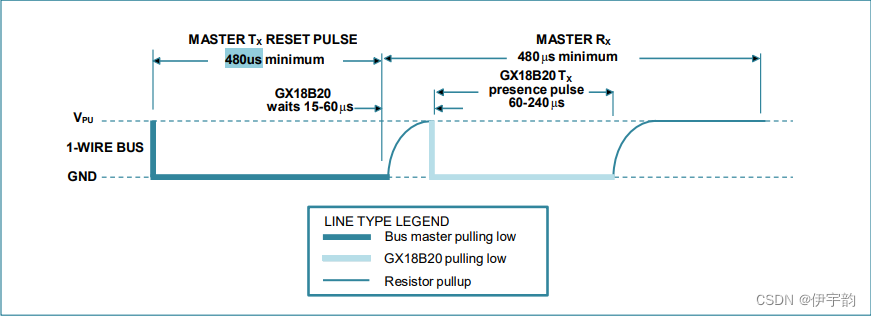
Bus master puling low : 主机拉低总线,主机向从机写 0
Gx18b20 pulling low : Gxs18b20 拉低总线,从机向主机发 0
Resistor pullup:从机的电阻上拉,期间从机可以接收主机写入的数据。
one_wire 端口是一个双向的端口,也即该端口可以发送数据,也可以接收数据。 主机有一个双向端口与从机连接,从机对应的端口的也是双向端口。 双向端口虽然可以发送和接收数据,但是发送数据时候,不能接收数据;也就是发送和接收数据必须分开进行。
各种手册里面经常出现“主机释放总线”,“从机释放总线”,这两个概念不是一个意思。同理“主机拉低总线”和“从机拉低总线”也不是一个意思。
主机释放总线:主机释放总线期间,主机可以接收来自从机的数据。注意, 如果主机要接收从机传来的数据。主机必须释放总线。
主机拉低总线:主机向从机写入逻辑 0
从机释放总线:从机释放总线、从机电阻上拉差不多是一个意思,代表着此时从机可以接收数据。
3.2.2 ROM 操作指令
在这里我们选择跳过ROM操作指令
SKIP ROM [CCh]
这条命令允许总线控制器不用提供 64 位 ROM 编码就使用功能指令。例如,总线控制器可以先发出一条忽略 ROM 指令,然后发出温度转换指令[44h],从而完成温度转换操作。
3.2.3 GXS18B20 功能指令
GXS18B20 功能指令允许总线控制器读写 GX18B20 的寄存器,发起温度转换和识别电源模式。
下表是GXS18B20的功能指令表

其中我们只使用温度转换指令(CONVERT T [44h])和读取温度指令(READ SCRATCHPAD [BEh])
CONVERT T [44h]
这条命令时用于启动一次温度转换。温度转换指令被执行后,产生的温度转换结果数据以 2 个字节的形式被存储在温度寄存器中,而后 GX18B20 保持低功耗的等待状态。如果在寄生供电模 式下发出该指令,在温度转换期间(tCONV),必须在 10us(最多)内给单总线一个强上拉,见 GX18B20 供电节。如果 GX18B20 以外部电源供电,总线控制器在发出该命令后跟着发出读时序, GX18B20 如处于转换中,则总线返回 0,若温度转换完成,则返回 1。在寄生供电模式下,总线 被强上拉拉高前这样的通信方式不会被使用。
READ SCRATCHPAD [BEh]
这条命令时主机读取寄存器命令。读取将从字节 0 的最低有效位开始,一直进行下去,直到 第 9 字节(字节 8,CRC)读完,如果不想读完所有字节,控制器可以在任何时候发出复位命令 来中止读取。
3.3 读写时序
读/写时序 GX18B20 的数据读写是通过时序处理来进行信息交换的,每个时序传输 1 位数据。
写时序
GX18B20 有两种写时序:写 1 时序和写 0 时序。总线控制器通过写 1 时序来写逻辑 1;通过 写 0 时序来写逻辑 0。写时序必须最少持续 60us,包括两个写周期之间至少 1us 的恢复时间。当 总线控制器把数据线从逻辑高电平拉低到低电平的时候,写时序开始。 总线控制器要写产生一个写时序,必须把数据线拉到低电平然后释放,且需在 15us 内释放总 线。当总线被释放后,上拉电阻将总线拉高。总线控制器要生成写 0 时序,必须把数据线拉到低 电平且继续保持至少 60us。 总线控制器初始化写时序后,GX18B20 在一个 15us 到 60us 的窗口内对信号线进行采用。如果线上是高电平,就是写 1。反之,如果线上是低电平,就是写 0。

读时序
总线控制器发起读时序时,GX18B20 仅被用来传输数据给控制器。因此,总线控制器在发出 读寄存器指令[BEh]或读电源模式指令[B4h]后必须立刻开始读时序,以便 GX18B20 提供请求的数 据。
所有读时序必须最少 60us,包括两个读周期间至少 1us 的恢复时间。当总线控制把数据线从 高电平拉低到低电平时,读时序开始,数据线必须至少保持 1us,然后总线被释放。 在总线控制器发出读时序后,GX18B20 通过拉高或拉低总线上来传输 1 或 0。当传输 0 结束后, 总线将被释放,通过上拉电阻回到高电平空闲状态。从 GX18B20 输出的数据在读时序的下降沿出 现后 15us 内有效。因此,总线控制器在读时序开始 15us 内释放总线然后采样总线状态,以读取数据线的状态。
图 1 标识 TINIT, TRC, 和 TSAMPLE 之和必须小于 15us。
图 2 指出,系统时间可以通过以下方法达到最大:TINIT 和 TRC 保持时间尽可能短,并且把控制器采样时间放到 15us 周期的最后。


4,FPGA驱动gxs18b20
4.1 编写代码思路
1,根据FPGA 与温度传感器的通信过程分析:
① FPGA对传感器进行初始化操作; ------> 分配一个字节时间 byte = 0
② 向传感器写入 0xcc; ------> 分配一个字节时间 byte = 1
③ 向传感器写入 0x44; ------> 分配一个字节时间 byte = 2
④ 等待一段时间; ------> 分配一个字节时间 byte = 3
⑤ 初始化操作; ------> 分配一个字节时间 byte = 4
⑥ 向传感器写入 0xcc; ------> 分配一个字节时间 byte = 5
⑦ 向传感器写入 0xbe; ------> 分配一个字节时间 byte = 6
⑧ 读取传感器温度,读取两个字节; ------> 分配两个字节时间 byte = 7/8
2,代码编写思路
①,定义一个us的计数器,计数器计数时间为100us;
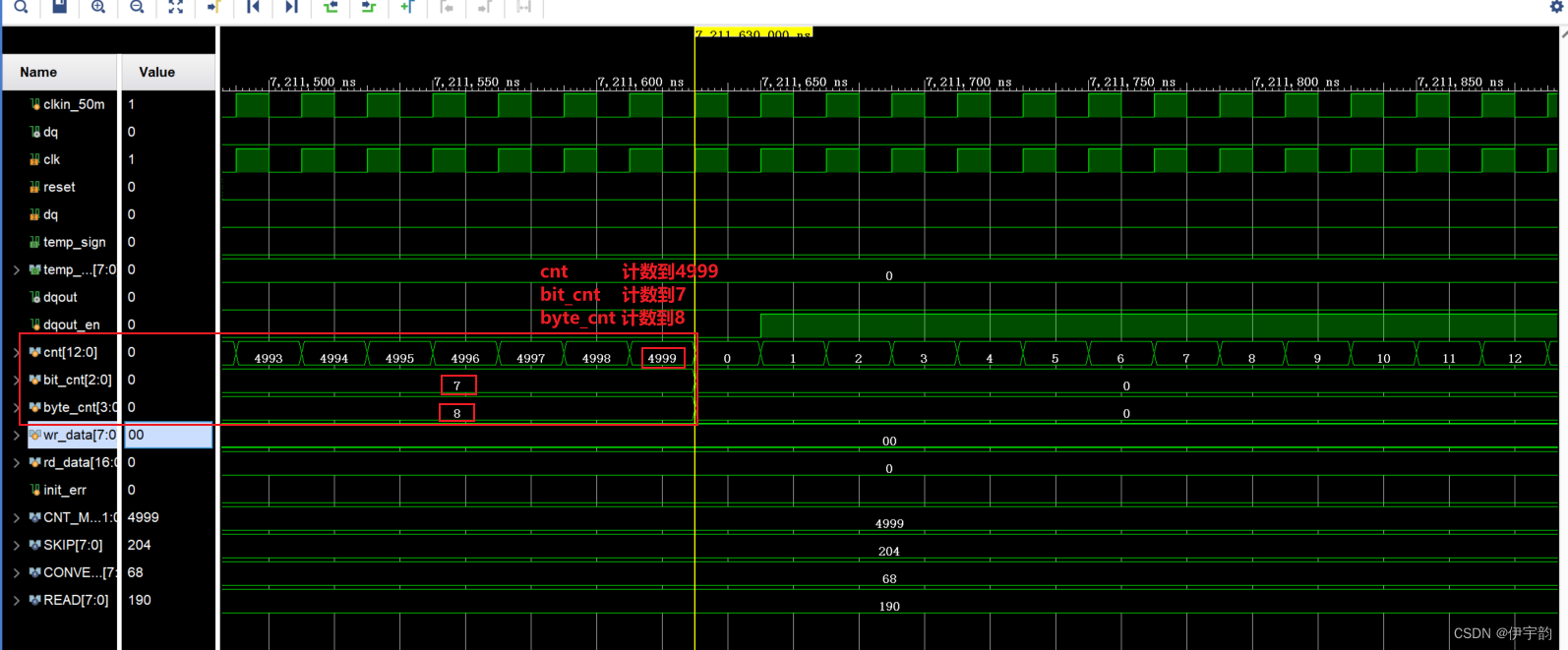
cnt 100_000/20 = 5000 --> 0-4999
90us时就是计数到4499
10us时就是计数到499
②,定义一个位计数器bit_cnt 在cnt==4999时加1,在bit_cnt == 7 && cnt==4999时清0
③,字节计数器 byte_cnt 在位计数器bit_cnt == 7 && cnt == 4999时加1,在bit_cnt == 7 && cnt == 4999 && byte==8时清0
④,在如何设计连续写1或者写0
定义一个[7:0]wr_data ,其中 bit_cnt是从0计数到7
wr_data在cnt计数到最大值时候,向右移位,通过判断wr_data[0]最低位,判断写0还是写1
4.2 代码编写
根据以上思路分析,编写代码如下:
`timescale 1ns / 1psmodule ds18b20_driver(input clk ,input reset ,input dq ,output reg temp_sign ,output reg [7:0] temp_data);localparam CNT_MAX = 4999 ;localparam SKIP = 8'hCC ;localparam CONVERT = 8'h44 ;localparam READ = 8'hBE ;wire dqout ;reg dqout_en ;reg [12:0] cnt ;reg [2 :0] bit_cnt ;reg [3 :0] byte_cnt ;reg [7 :0] wr_data ;reg [16:0] rd_data ;reg init_err ;//三态门assign dq = dqout_en == 1 ? dqout: 1'bz;assign dqout = 0;//计数器always @(posedge clk ) beginif (reset) begincnt <= 0;endelse if (cnt == CNT_MAX) begincnt <= 0; endelse begincnt <= cnt + 1;endendalways @(posedge clk ) beginif (reset) beginbit_cnt <= 0;endelse if (cnt == CNT_MAX && bit_cnt == 7) beginbit_cnt <= 0; endelse if (cnt == CNT_MAX)beginbit_cnt <= bit_cnt + 1;endendalways @(posedge clk ) beginif (reset) beginbyte_cnt <= 0;endelse if (cnt == CNT_MAX && bit_cnt == 7 && byte_cnt == 8) beginbyte_cnt <= 0; endelse if (cnt == CNT_MAX && bit_cnt == 7)beginbyte_cnt <= byte_cnt + 1;endendalways @(posedge clk ) beginif ((byte_cnt == 0 || byte_cnt == 4) && bit_cnt == 7 && cnt == CNT_MAX) beginwr_data <= SKIP;endelse if(bit_cnt == 7 && byte_cnt == 1 && cnt == CNT_MAX) beginwr_data <= CONVERT;endelse if(bit_cnt == 7 && byte_cnt == 5 && cnt == CNT_MAX) beginwr_data <= READ;endelse if (cnt == CNT_MAX) beginwr_data <= wr_data >> 1;endendalways @(posedge clk) beginif (reset) begindqout_en <= 0;endelse if(byte_cnt == 0 || byte_cnt == 4)begin //初始化dqout_en <= bit_cnt <= 4 ? 1'b1 : 1'b0; end else if(byte_cnt == 3) //等待dqout_en <= 0; else if (byte_cnt == 1 || byte_cnt == 2 || byte_cnt == 5 || byte_cnt == 6) //向传感器写入字节begin dqout_en <= cnt == 0 ? 1'b1 : (((cnt == 499 && wr_data[0]) || (cnt == 4599 && ~wr_data[0])) ? 1'b0 : dqout_en);endelse if(byte_cnt == 7 || byte_cnt == 8)dqout_en <= cnt <= 99 ? 1'b1 : 1'b0; //拉高2US 读取采样end //主机采样always @(posedge clk ) begin if(reset) beginrd_data <= 0;end else if((byte_cnt == 7 || byte_cnt == 8) && cnt == 649 ) //13us采样beginrd_data <= {dq,rd_data[15:1]};endelserd_data <= rd_data;endalways @(posedge clk ) begin if(byte_cnt == 8 && bit_cnt == 7 && cnt == 659 && ~rd_data[15]) begintemp_data <= rd_data[10:4];temp_sign <= rd_data[15] ;endelse if(byte_cnt == 8 && bit_cnt == 7 && cnt == 659 && rd_data[15]) begintemp_data <= ~rd_data[10:4] + 1 ;temp_sign <= rd_data[15] ;endend always @(posedge clk ) beginif((byte_cnt == 0 || byte_cnt == 4) && bit_cnt == 6 && cnt == CNT_MAX) //初始化采?beginif (dq == 0)init_err <= 0;elseinit_err <= 1;end endendmodule
在这里编写了一个顶层模块,其中定义了一个时钟管理单元 (PLL实现)来管理时钟和复位信号,
顶层模块如下:
`timescale 1ns / 1ps
module top(input wire clkin_50m,inout dq );wire reset;wire clk;wire temp_sign;wire [7:0] temp_data;clock_and_reset clock_and_reset (.clkin_50m (clkin_50m), .clkout_50M(clk), .reset (reset));ds18b20_driver ds18b20_driver(.clk (clk),.reset (reset),.dq (dq),.temp_sign (temp_sign),.temp_data (temp_data));endmodule
4.3 测试仿真
由于18b20温度传感器属于从机,所以仿真时较难,采用半仿真。我们定义一个仿真文件slave.v
其中让dq作为输出,使其输出0,然后将此模块例化到测试模块中
`timescale 1ns / 1ps
module slave(output dq);assign dq = 0;endmodule测试代码如下:
`timescale 1ns / 1psmodule tb_top();reg clkin_50m ;wire dq ;pullup(dq); // pullup原语 模拟上拉电阻 可以让dq空闲状态处于高电平top top (.clkin_50m(clkin_50m), .dq(dq));slave slave (.dq(dq));initial beginclkin_50m = 0;forever #(10) clkin_50m = ~clkin_50m;endendmodule
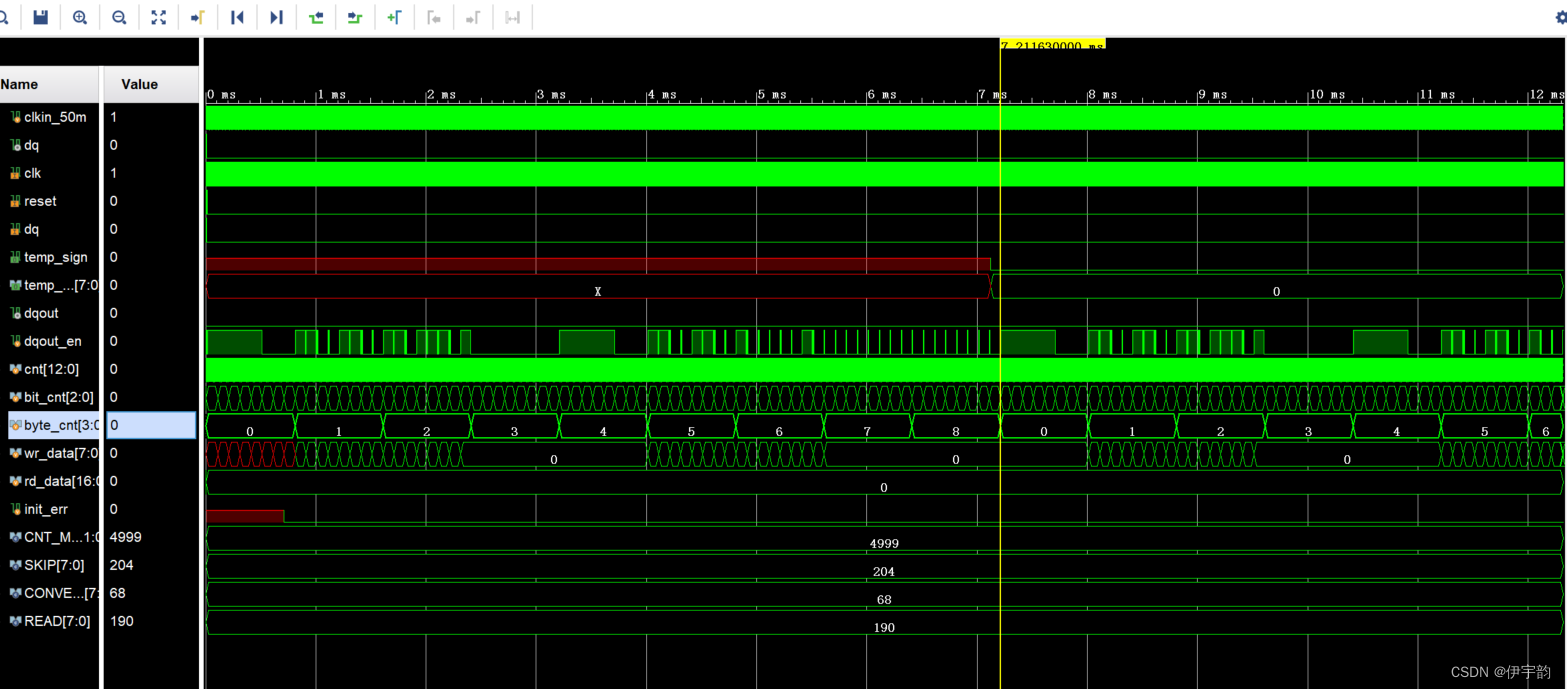
4.4 仿真波形
仿真波形如下