基于yolov7与arduino的眼睛跟随模块
- 整个模块的介绍
- 摄像模块
- 图片传输模块
- 图像检测模块
- 控制模块
- 动力模块
整个模块的介绍
我们首先需要一个图片收集的模块来对当前的图片进行收集然后将图片传至服务端对图片中的眼睛利用YOLO进行检测最后将数据传至arduino使其控制动力模块来进行位置调整使目标一直与眼睛处于一个水平线
摄像模块
这里我们使用ESP32-cam来获取照片并通过无线网络来上传至服务器

要使用它我们首先需要下载支持esp32的库
下载教程: https://blog.csdn.net/qq_62975494/article/details/132539804
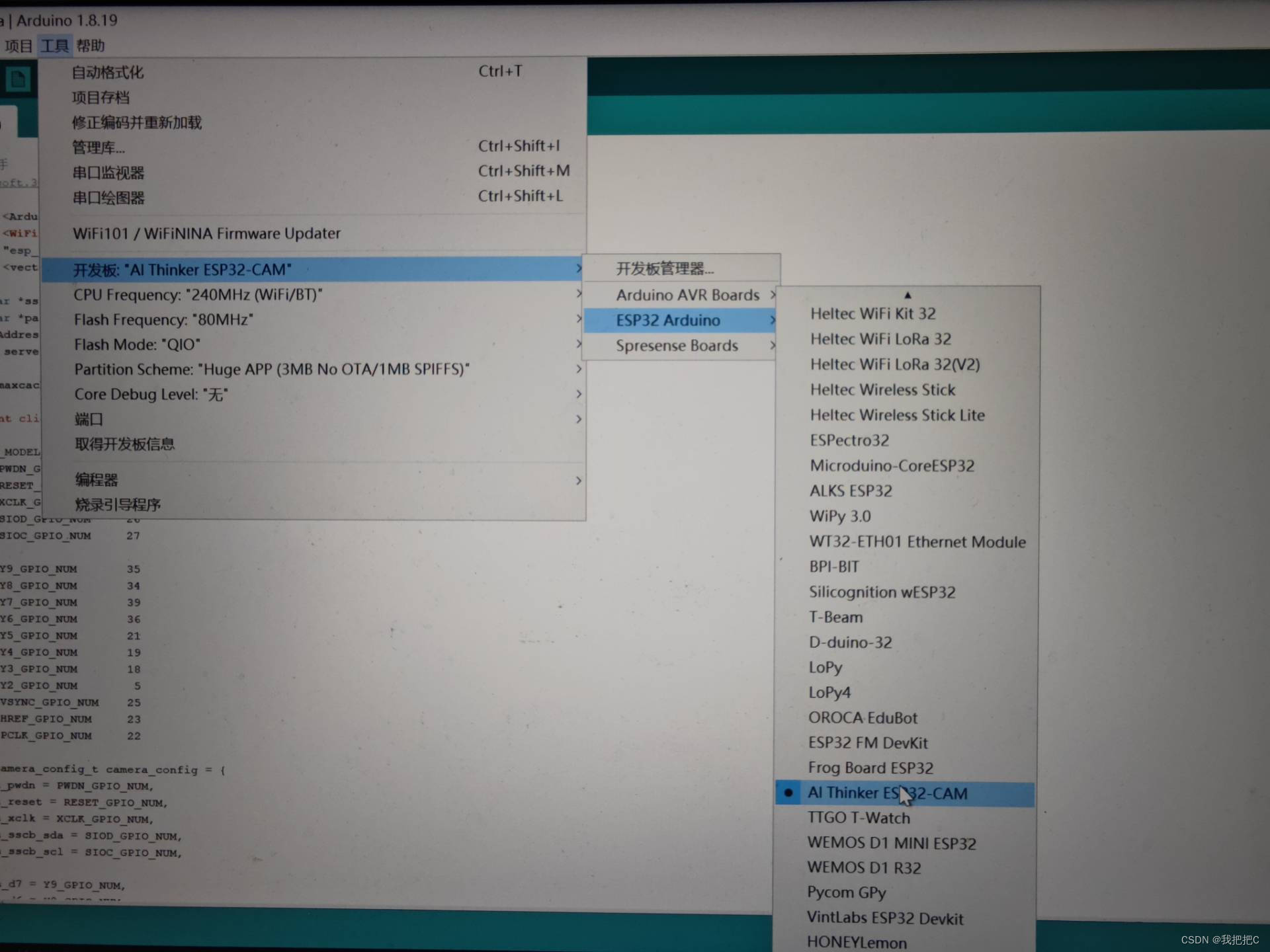
烧录时我们选择AI Thinker
图片传输模块
我们通过esp32的wifi模式对拍摄到的图片进行传输
与服务端建立连接->发送第一张图片->等待服务端指令->收到指令后继续发送->等待指令
客户端代码(esp32-cam)
/*
网络调试助手
https://soft.3dmgame.com/down/213757.html
*/
#include <Arduino.h>
#include <WiFi.h>
#include "esp_camera.h"
#include <vector>const char *ssid = "xxo"; wifi id
const char *password = "12345678"; wifi密码
const IPAddress serverIP(10,218,19,53); //欲访问的地址
uint16_t serverPort = 8080; //服务器端口号#define maxcache 1430WiFiClient client; //声明一个客户端对象,用于与服务器进行连接//CAMERA_MODEL_AI_THINKER类型摄像头的引脚定义
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22static camera_config_t camera_config = {.pin_pwdn = PWDN_GPIO_NUM,.pin_reset = RESET_GPIO_NUM,.pin_xclk = XCLK_GPIO_NUM, .pin_sscb_sda = SIOD_GPIO_NUM,.pin_sscb_scl = SIOC_GPIO_NUM,.pin_d7 = Y9_GPIO_NUM,.pin_d6 = Y8_GPIO_NUM,.pin_d5 = Y7_GPIO_NUM,.pin_d4 = Y6_GPIO_NUM,.pin_d3 = Y5_GPIO_NUM,.pin_d2 = Y4_GPIO_NUM,.pin_d1 = Y3_GPIO_NUM,.pin_d0 = Y2_GPIO_NUM,.pin_vsync = VSYNC_GPIO_NUM,.pin_href = HREF_GPIO_NUM,.pin_pclk = PCLK_GPIO_NUM,.xclk_freq_hz = 20000000, //帧率.ledc_timer = LEDC_TIMER_0,.ledc_channel = LEDC_CHANNEL_0,.pixel_format = PIXFORMAT_JPEG,.frame_size = FRAMESIZE_VGA, //图片格式.jpeg_quality = 12, //PEG图片质量(jpeg_quality),0-63,数字越小质量越高.fb_count = 1,
};
void wifi_init()
{WiFi.mode(WIFI_STA);WiFi.setSleep(false); //关闭STA模式下wifi休眠,提高响应速度WiFi.begin(ssid, password);while (WiFi.status() != WL_CONNECTED){delay(500);Serial.print(".");}Serial.println("WiFi Connected!");Serial.print("IP Address:");Serial.println(WiFi.localIP());
}
esp_err_t camera_init() {//initialize the cameraesp_err_t err = esp_camera_init(&camera_config);if (err != ESP_OK) {Serial.println("Camera Init Failed");return err;}sensor_t * s = esp_camera_sensor_get();//initial sensors are flipped vertically and colors are a bit saturatedif (s->id.PID == OV2640_PID) {// s->set_vflip(s, 1);//flip it back// s->set_brightness(s, 1);//up the blightness just a bit// s->set_contrast(s, 1);}Serial.println("Camera Init OK!");return ESP_OK;
}void setup()
{Serial.begin(115200);wifi_init();camera_init();
}void loop()
{Serial.println("Try To Connect TCP Server!");if (client.connect(serverIP, serverPort)) //尝试访问目标地址{Serial.println("Connect Tcp Server Success!");//client.println("Frame Begin"); //46 72 61 6D 65 20 42 65 67 69 6E // 0D 0A 代表换行 //向服务器发送数据while (1){ camera_fb_t * fb = esp_camera_fb_get();uint8_t * temp = fb->buf; //这个是为了保存一个地址,在摄像头数据发送完毕后需要返回,否则会出现板子发送一段时间后自动重启,不断重复if (!fb){Serial.println( "Camera Capture Failed");}else{ //先发送Frame Begin 表示开始发送图片 然后将图片数据分包发送 每次发送1430 余数最后发送 //完毕后发送结束标志 Frame Over 表示一张图片发送完毕 client.print("Frame Begin"); //一张图片的起始标志// 将图片数据分段发送int leng = fb->len;int timess = leng/maxcache;int extra = leng%maxcache;for(int j = 0;j< timess;j++){client.write(fb->buf, maxcache); for(int i =0;i< maxcache;i++){fb->buf++;}}client.write(fb->buf, extra);client.print("Frame Over"); // 一张图片的结束标志Serial.print("This Frame Length:");Serial.print(fb->len);Serial.println(".Succes To Send Image For TCP!");//return the frame buffer back to the driver for reusefb->buf = temp; //将当时保存的指针重新返还esp_camera_fb_return(fb); //这一步在发送完毕后要执行,具体作用还未可知。 }//等待服务端回应while (1) //如果已连接或有收到的未读取的数据{if (client.available()) //如果有数据可读取{String line = client.readStringUntil('\n'); //读取数据到换行符Serial.print("读取到数据:");Serial.println(line);break;}}}while (client.connected() || client.available()) //如果已连接或有收到的未读取的数据{if (client.available()) //如果有数据可读取{String line = client.readStringUntil('\n'); //读取数据到换行符Serial.print("ReceiveData:");Serial.println(line);client.print("--From ESP32--:Hello Server!"); }}Serial.println("close connect!");//client.stop(); //关闭客户端}else{Serial.println("Connect To Tcp Server Failed!After 10 Seconds Try Again!");client.stop(); //关闭客户端}delay(10000);
}
服务端我们使用python来进行编写
import socket
import threading
import timeimport bluetoothbegin_data = b'Frame Begin'
end_data = b'Frame Over'v=0def handle_sock(sock, addr):global vprint('----------开始接收-------')temp_data = b''while 1:if 1:print(11111111111111111111111111111111)data = sock.recv(1430)# 如果这一帧数据包的开头是 b'Frame Begin' 则是一张图片的开始if data[0:len(begin_data)] == begin_data:# 将这一帧数据包的开始标志信息(b'Frame Begin')清除 因为他不属于图片数据data = data[len(begin_data):len(data)]# 判断这一帧数据流是不是最后一个帧 最后一针数据的结尾时b'Frame Over'while data[-len(end_data):] != end_data:temp_data = temp_data + data # 不是结束的包 讲数据添加进temp_datadata = sock.recv(1430) # 继续接受数据 直到接受的数据包包含b'Frame Over' 表示是这张图片的最后一针# 判断为最后一个包 将数据去除 结束标志信息 b'Frame Over'temp_data = temp_data + data[0:(len(data) - len(end_data))] # 将多余的(\r\nFrame Over)去掉 其他放入temp_datawith open(f'./eyes/{v}.jpg', 'wb') as fp:fp.write(temp_data)v=v+1print("接收到的数据包大小:" + str(len(temp_data))) # 显示该张照片数据大小print('------接收下一张图片--------')#cv2.imshow('server_frame', r_img)#print("接收到的数据包大小:" + str(len(temp_data))) # 显示该张照片数据大小temp_data = b'' # 清空数据 便于下一章照片使用#处理数据a=input()sock.send("1".encode('utf-8'))time.sleep(1)
server = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
server.bind(('10.218.19.53', 8080))
server.listen(5)
CONNECTION_LIST = []# 主线程循环接收客户端连接
while True:sock, addr = server.accept()CONNECTION_LIST.append(sock)print('Connect--{}'.format(addr))# 连接成功后开一个线程用于处理客户端client_thread = threading.Thread(target=handle_sock, args=(sock, addr))client_thread.start()
通过传输模块我们就可以将esp32获取的图片存至服务端的指定位置等待检测模块的目标检测
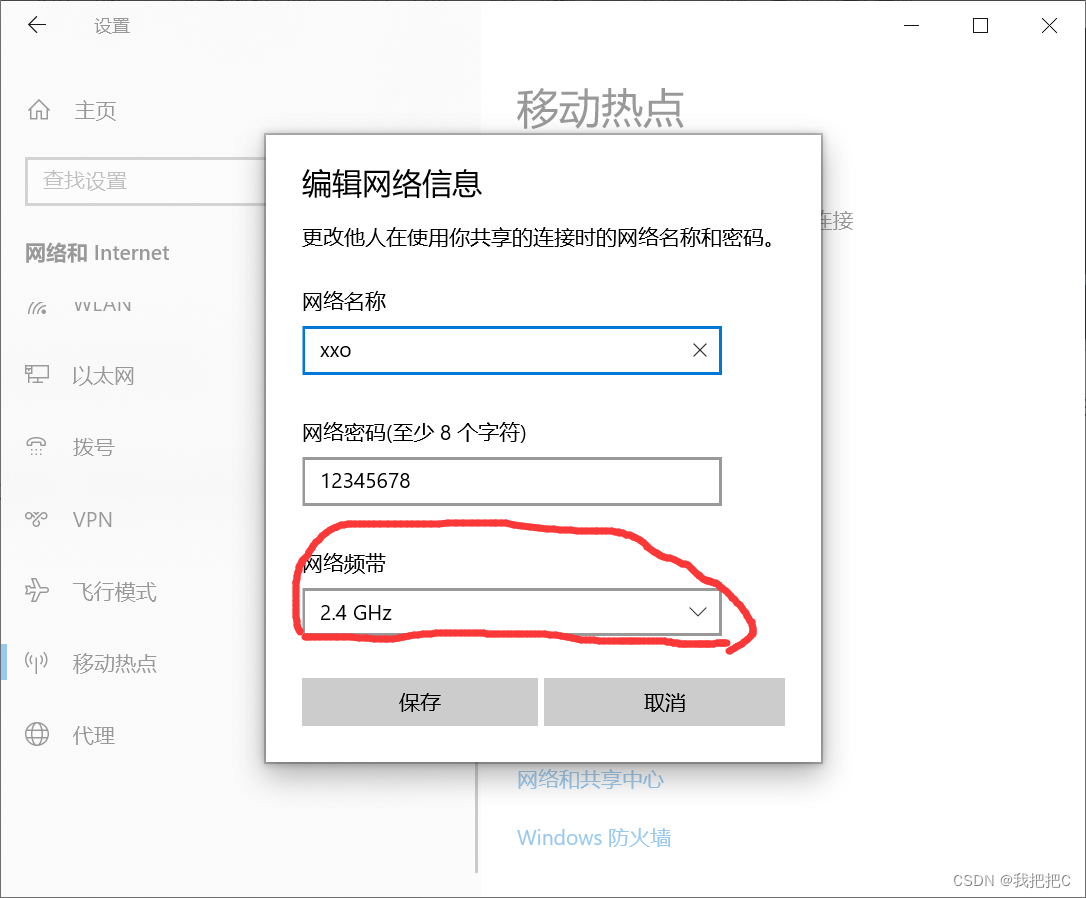
使用esp32-cam连接热点时我们需要将热点的网络频带调制2.4因为它不支持5G频带
图像检测模块
此模块中我们将使用yolov7对传输模块传输来的图片数据进行检测然后通过蓝牙将检测到的数据发送至控制模块
数据集的训练请参考
数据集训练: https://blog.csdn.net/qq_62975494/article/details/129786717
云GPU的使用: https://blog.csdn.net/qq_62975494/article/details/136565413
import torch
# 加载本地模型
device = torch.device("cuda")
model = torch.hub.load('D:/AI/yolov7-main', 'custom','D:\AI\yolov7-main\weights\last2.pt',source='local', force_reload=False)
while 1:if 1:# 使用模型model = model.to(device)# 开始推理results = model('./eyes.jpg')# 过滤模型xmins = results.pandas().xyxy[0]['xmin']ymins = results.pandas().xyxy[0]['ymin']xmaxs = results.pandas().xyxy[0]['xmax']ymaxs = results.pandas().xyxy[0]['ymax']class_list = results.pandas().xyxy[0]['class']confidences = results.pandas().xyxy[0]['confidence']newlist = []for xmin, ymin, xmax, ymax, classitem, conf in zip(xmins, ymins, xmaxs, ymaxs, class_list, confidences):if classitem == 0 and conf > 0.5:newlist.append([int(xmin), int(ymin), int(xmax), int(ymax), conf])print(newlist)
#图片格式640x480 240newlist中储存的就是图片中检测到的目标
然后我们需要通过计算将所要移动的距离通过蓝牙发送给控制模块(arduino)
python使用蓝牙发送数据
import time
import bluetoothsock = bluetooth.BluetoothSocket(bluetooth.RFCOMM)
sock.connect(("98:DA:20:04:C1:67", 1))
time.sleep(3)
while 1:a = input()sock.send(a)time.sleep(2)
控制模块
控制模块我们使用arduino控制模块主要负责动力模块的控制和接收检测模块得到的结果
arduino蓝牙模块使用: https://blog.csdn.net/catzhaojia/article/details/119243058
arduino超声波测距: https://blog.csdn.net/TonyIOT/article/details/103232332
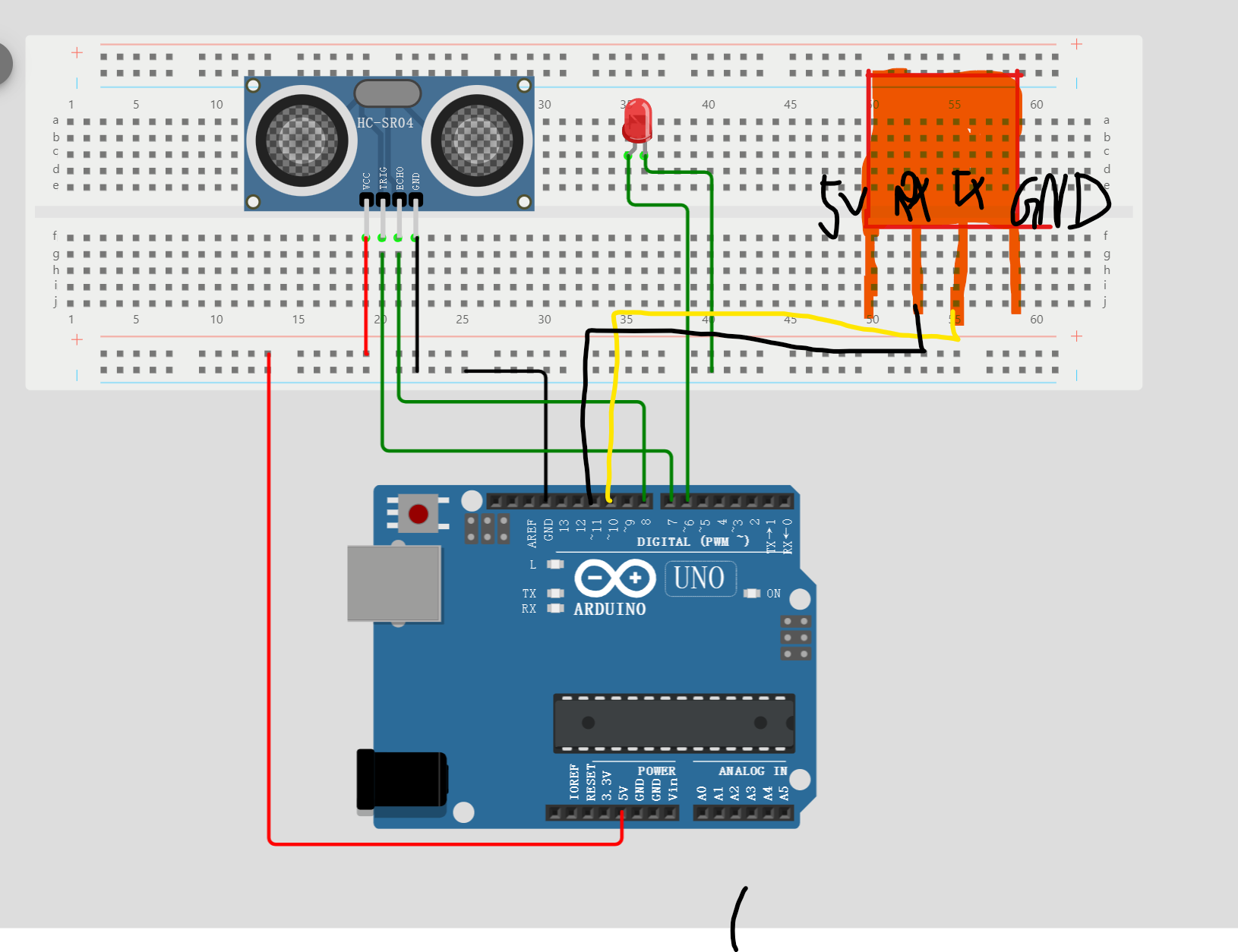
控制模块模块图
#include <SoftwareSerial.h>
// Pin10接HC05的TXD
// Pin1接HC05的RXDString comdata = "";
int timeb=0;
SoftwareSerial BT(10, 11);
char val;
// 设定SR04连接的数字引脚
const int trigPin = 7; //设置接受引脚
const int echoPin = 8; //设置发射引脚float sound_spd=343;//声速初始值
float distance; //距离void setup() {Serial.begin(115200); Serial.println("bluetooth is ready!蓝牙准备就绪");BT.begin(9600);pinMode(trigPin, OUTPUT); // 要检测引脚上输入的脉冲宽度,需要先设置为输入状态pinMode(echoPin, INPUT);
pinMode(6, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
digitalWrite(5, LOW);Serial.println("HC-SR04-2019.7.14测距开始:");
digitalWrite(23, HIGH);
digitalWrite(24, LOW);
digitalWrite(25, LOW);
}void loop() {
// 产生一个10us的高脉冲去触发TrigPin digitalWrite(trigPin, LOW); delayMicroseconds(2); //产生高脉冲前线产生2us低脉冲,确保高脉冲的纯净digitalWrite(trigPin, HIGH); delayMicroseconds(10);digitalWrite(trigPin, LOW); // 检测脉冲宽度,并计算出距离distance = pulseIn(echoPin, HIGH)/ 58.00;Serial.print(distance); //把得到的距离值通过串口通信返回给电脑,通过串口监视器显示出来Serial.println("cm"); if(distance<=20){digitalWrite(6, HIGH);}
else{digitalWrite(6, LOW);
}delay(300); //500mS测量一次while (BT.available() > 0) {comdata += char(BT.read());delay(2);}if (comdata.length() > 0){Serial.println(comdata);timeb=comdata.toFloat();if(timeb<0){下降}else if(timeb>0&&timeb<998){上升}else if(timeb==999){不动}comdata = "";}
}
动力模块
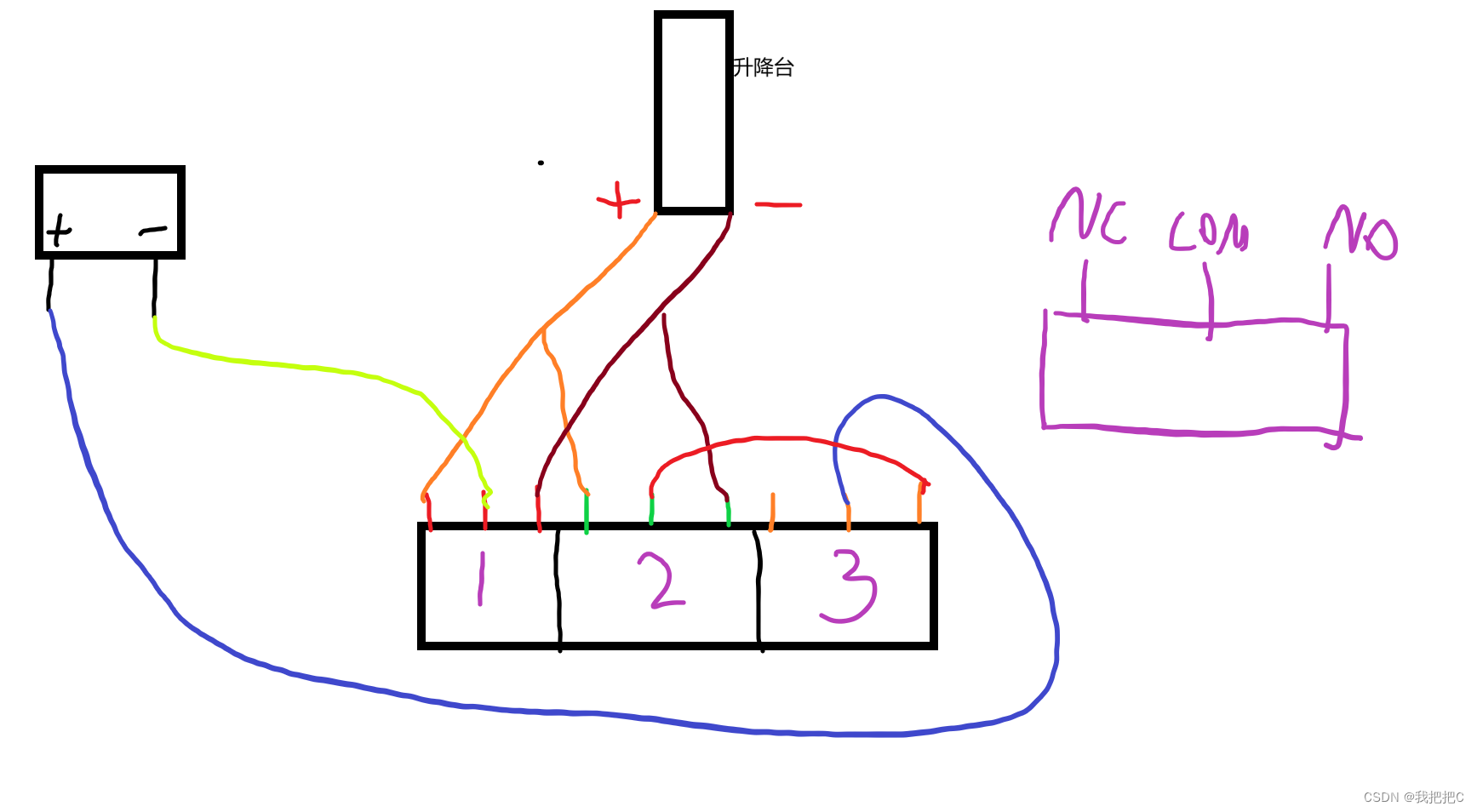
动力模块用来控制升降平台的升降由于需要24v电源无法由主板直接供电所以我们使用继电器用主板的5v电压来控制更高的电压
arduino继电器使用: https://blog.csdn.net/TonyIOT/article/details/82875925

继电器1用来控制上升接IN1连接arduino 4号引脚
继电器2用来控制下降接IN2连接arduino 5号引脚
继电器1来控制整个动力模块的电源通断接IN3连接arduino 3号引脚
电源与升降台连接图
#include <SoftwareSerial.h>
// Pin10接HC05的TXD
// Pin1接HC05的RXDString comdata = "";
int timeb=0;
SoftwareSerial BT(10, 11);
char val;
// 设定SR04连接的数字引脚
const int trigPin = 7; //设置接受引脚
const int echoPin = 8; //设置发射引脚float sound_spd=343;//声速初始值
float distance; //距离void setup() {Serial.begin(115200); Serial.println("bluetooth is ready!蓝牙准备就绪");BT.begin(9600);pinMode(trigPin, OUTPUT); // 要检测引脚上输入的脉冲宽度,需要先设置为输入状态pinMode(echoPin, INPUT);
pinMode(6, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
digitalWrite(5, LOW);Serial.println("HC-SR04-2019.7.14测距开始:");
digitalWrite(23, HIGH);
digitalWrite(24, LOW);
digitalWrite(25, LOW);
}void loop() {// 产生一个10us的高脉冲去触发TrigPin digitalWrite(trigPin, LOW); delayMicroseconds(2); //产生高脉冲前线产生2us低脉冲,确保高脉冲的纯净digitalWrite(trigPin, HIGH); delayMicroseconds(10);digitalWrite(trigPin, LOW); // 检测脉冲宽度,并计算出距离distance = pulseIn(echoPin, HIGH)/ 58.00;Serial.print(distance); //把得到的距离值通过串口通信返回给电脑,通过串口监视器显示出来Serial.println("cm"); if(distance<=20){digitalWrite(6, HIGH);}
else{digitalWrite(6, LOW);
}delay(300); //500mS测量一次while (BT.available() > 0) {comdata += char(BT.read());delay(2);}if (comdata.length() > 0){Serial.println(comdata);timeb=comdata.toFloat();if(timeb<0){digitalWrite(3, LOW); digitalWrite(5, HIGH);delay(timeb*1000*-1);digitalWrite(3, HIGH); digitalWrite(5, LOW);}else if(timeb>0&&timeb<998){digitalWrite(3, LOW); digitalWrite(4, HIGH);Serial.println(timeb);delay(timeb*1000);digitalWrite(3, HIGH); digitalWrite(4, LOW);}else if(timeb==999){digitalWrite(3, LOW); digitalWrite(5, HIGH);delay(1000);digitalWrite(5, LOW);digitalWrite(4, HIGH);delay(1000);digitalWrite(3, HIGH); digitalWrite(4, LOW);}comdata = "";}}