RflySim| 定点位置控制器设计实验四
01 设计实验
1.建立位置控制通道的传递函数模型
使用MATLAB “ControlSystemDesigner”设计校正控制器,使得加入校正环节后系统速度控制环阶跃响应稳态误差 ,相位裕度>75°截止频率>2.0rad/s。位置控制环截止频率>1rad/s,相位裕度>60° ;
2.使用自己设计的控制器进行软件在环仿真实验和硬件在环仿真实验;
本实验对应demo文件对于RflySim v3.0以下版本地址为:*\PX4PSP\RflySimAPIs\Exp02_FlightControl\e6-PositionCtrl\e6.3;
对于RflySim v3.0及以上版本地址为:*\PX4PSP\RflySimAPIs\5.RflySimFlyCtrl\1.BasicExps\e6-PositionCtrl\e6.3。
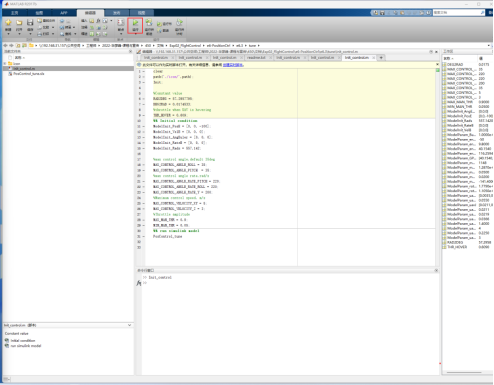
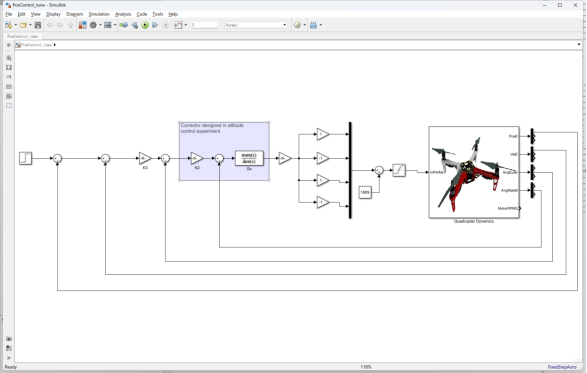
打开e6-PositionCtrl\PID-Config\e6.3\tune\Init_control.m文件,点击运行初始化参数,PosControl_tune.slx文件将会自动打开,如下图所示。
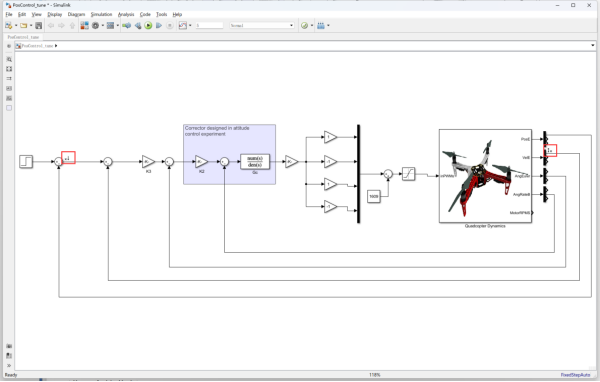
速度环分析:输入为期望速度,输出为实际速度。设置输入输出点如下图所示。
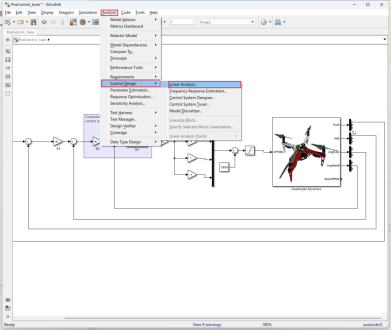
点击运行后,进行如下图所示操作生成Bode图
生成 Bode 图后,在左侧“Linear Analysis Workspace”中会出现“linsys1”变量。如下图所示操作,即可得到传递函数模型。
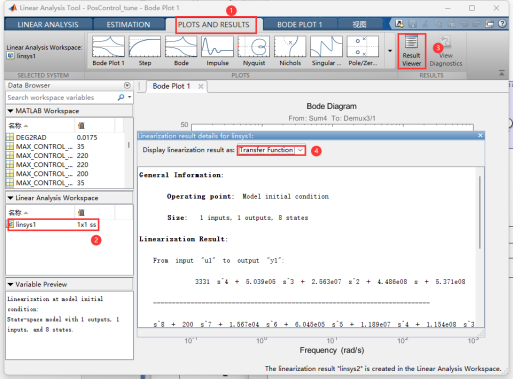
由下图所示得到的传递函数为:
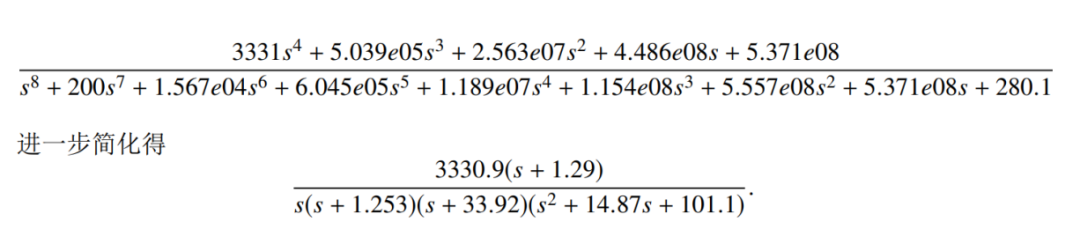
由上述传递函数建立如下图的.m 文件
num=[3331 5.039e05 2.563e07 4.486e08 5.371e08];
den=[1 200 1.567e04 6.045e05 1.189e07 1.154e08 5.557e08 5.371e08 280.1];
G=tf(num,den);Z=[-1.29];
P=[-5.214e-7 -1.253 -33.92];
zpk1=zpk(G)
GG=tf(zpk1)
controlSystemDesigner('bode',G);
运行即可使用 MATLAB 基于 Bode 图的控制系统计,如下图所示。
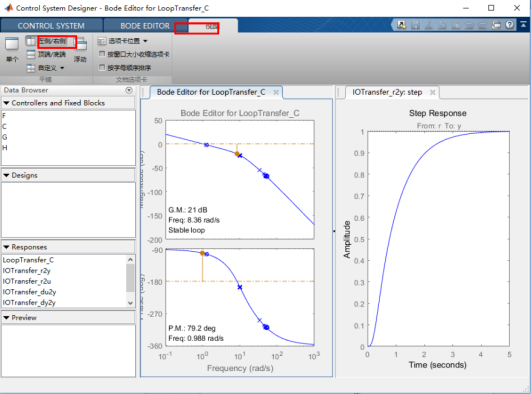
使用工具箱校正:由上图可知,系统的响应较慢,向上拖动Bode图曲线增大开环增益。增益增大,从阶跃响应曲线上看,响应时间 变短,但是带来了超调。从Bode图上看,相 位裕度为50.1°,相比设计目标偏小。
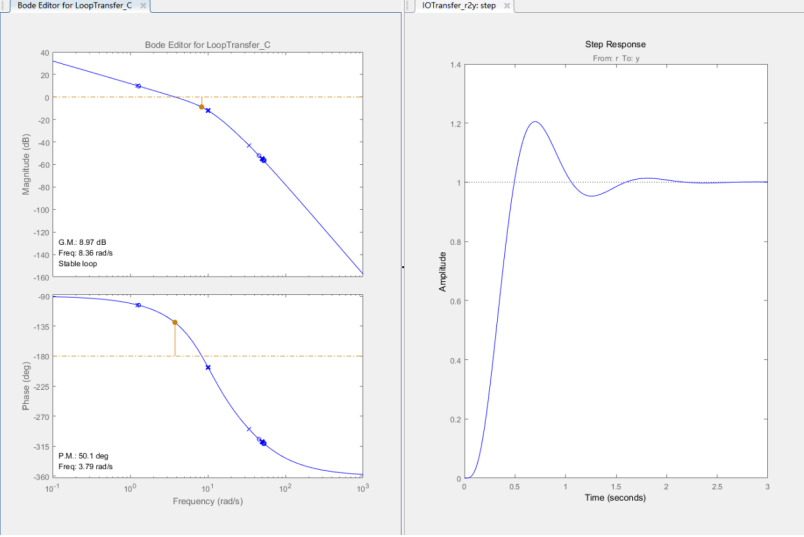
图. 加大增益对Bode图和阶跃响应的影响
增加一个超前校正环节,提高相位裕度,还能进一步提高截止频率,增加响应速度。在 Bode 图中右键“add Pole/Zero”-“Lead”, 直接拖动零极点观测响应曲线,得到合适的矫正环节,如下图所示。
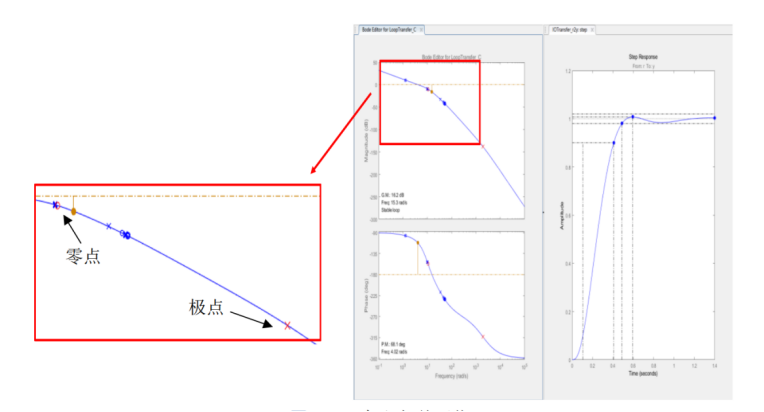
图. 加入超前环节
在 Bode 图中右键“Edit Conpensator”,如下图所示
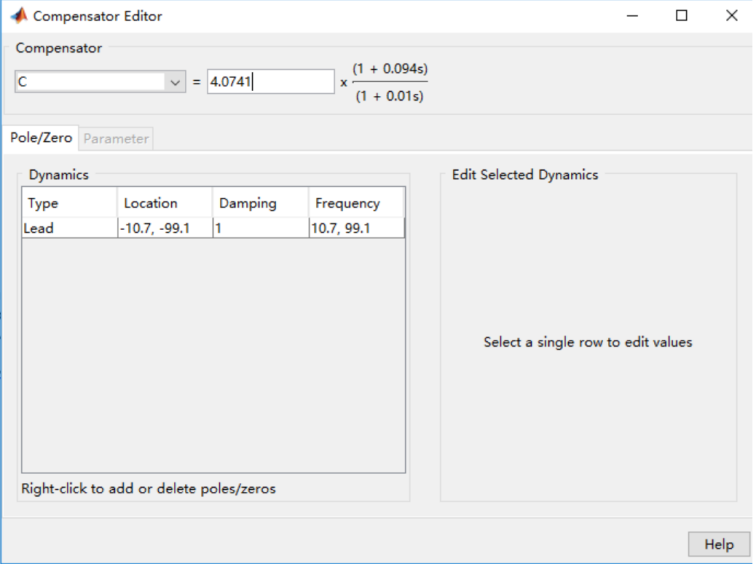
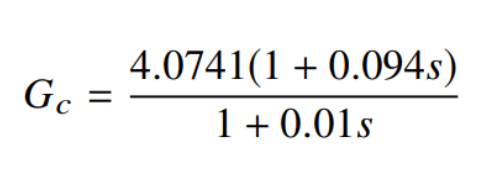
看最终的得到的校正器为:
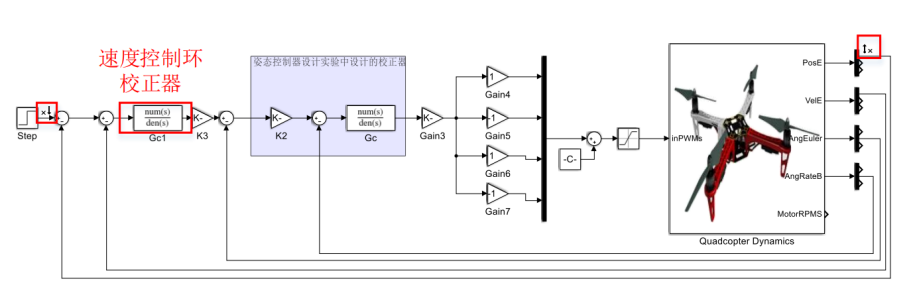
对x通道位置环进行校正:加入Step 3中得到的速度环校正器,如下图所示。
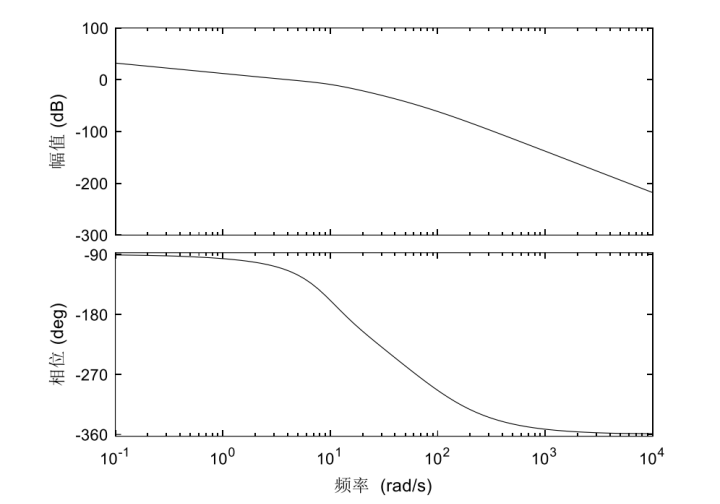
得到位置环的 Bode 图如下图所示, 相位裕度为 75.8◦,截止频率 0.99,基本满足要求。可略微增加增益,提高截止频率。(例如取位置环增 益为1.2,重新绘制Bode图,相位裕度为65.3° , 截止频率为1.12,满足实验指标。)
仿真实验:前述设计的校正环节是时域连续的环节,加入该模型应将其变为时域离散的环节。使用 c2d 函数将s域的传递函数(按下述提示自行输入)变为 z 域传递函数。
H = tf([num], [den])
Hd = c2d(H, Ts, ’foh’)
其中“num”为传递函数分子系数向量,“den”为传递函数分母系数向量,“Ts”为仿真步长,本例 中为 0.004s。
这里替换后的传递函数为:

将 Simulink 模型中的 PID 控制器替换成离散模块, (在"e6-PositionCtrl\PID-Config\e6.3\HIL\PosControl_HIL.slx"中找到PosControl_HIL/Control System/Subsystem1/position_control子模块)如下图所示
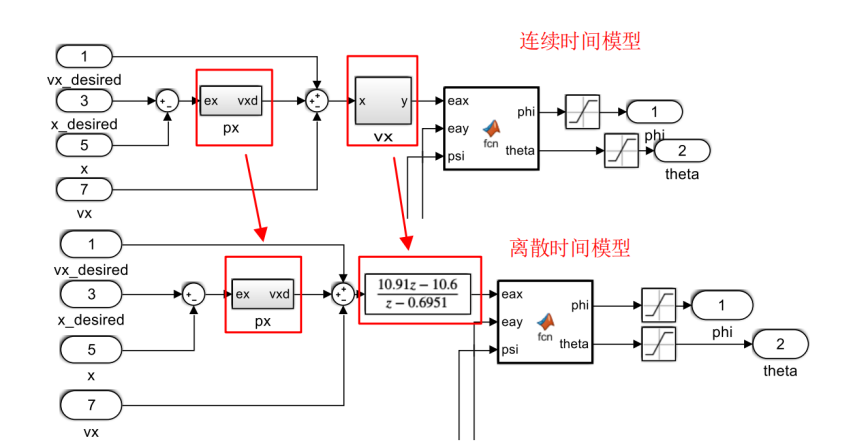
图 替换原来的 PID 校正器
将"e6-PositionCtrl\PID-Config\e6.3\HIL\PosControl_HIL.slx"模型编译完成后烧入飞控,进行硬件在环仿真, 多旋翼可以实现基本的直线飞行和悬停。
参考文献:
[1] 全权,杜光勋,赵峙尧,戴训华,任锦瑞,邓恒译.多旋翼飞行器设计与控制[M],电子工业出版社,2018.
[2] 全权,戴训华,王帅.多旋翼飞行器设计与控制实践[M],电子工业出版社,2020.