B站参考视频:Intel英特尔RealSense实感深度摄像头 自校准(Self-Calibration)操作步骤讲解 D400系列适用_
Viewer工具与校准纹理目标纸下载:https://download.csdn.net/download/weixin_43042683/86242590
1.下载最新版本的Viewer工具和固件
官网下载地址:https://www.intelrealsense.com/sdk-2/
使用Intel RealSense Viewer更新D400深度相机固件 update your depth camera firmware
使用Intel RealSense Viewer更新D400深度相机固件 update your depth camera firmware
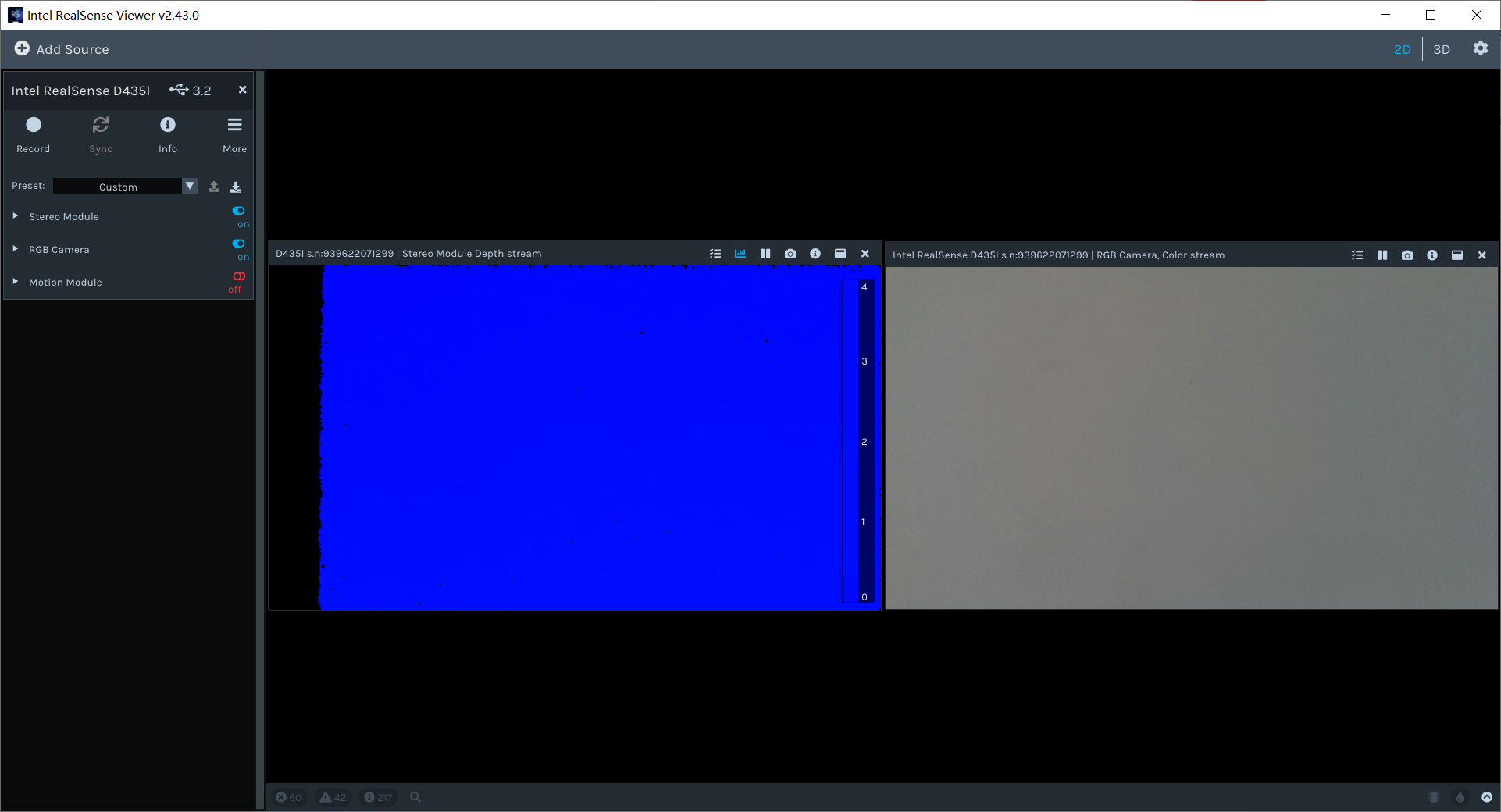
2.打开Intel RealSense Viewer,连接设备(例:D435i)

3.首先点击“More”-“Install Recommended Firmware” ,安装推荐的固件版本,等待固件刷入

4.自校准的场景一般可分为三种
(1)普通场景一:平整的白墙
在墙面场景中,我们找寻一面平整的白色墙壁,固定相机,启动摄像头画面,对准墙面

点击“More”-“On-Chip Calibration” 右侧出现的弹窗中,在Speed速度中选择:“White Wall” 下面可勾选对内参(Intrinsic),外参(Extrinsic)校准的选择
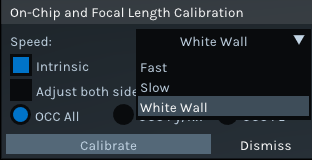
点击“Calibrate”启动校准,等待进度条加载结束,反馈出校准的结果。

右侧出现的弹窗中,我们能够看到两项数值Health-Check(下面简称HC)和FL Health-Check(下面简称FL HC)
当HC<0.25,FL HC<0.15,我们可以保留原有校准数据,即点击“Dismiss”忽略。
当HC>0.25,FL HC>0.15,我们需要改善原有校准数据,即点击“Apply New”应用新的校准数据,并且再运行一次On-Chip Calibration ,继续观察两项数值,直至它们分别低于0.25和0.15,
若HC或FL HC>0.75,原有校准数据必须要进行改善,并且建议直接使用动态校准或OEM校准(Intel英特尔RealSense实感深度摄像头 OEM校准操作步骤讲解OEM Calibration 恢复出厂精度)。




(2)普通场景二:任意环境下(注意有效深度覆盖50%以上)
启动摄像头,观察所处环境中的深度画面,注意确保画面中有效的深度覆盖率达到50%以上
 确认放置在合适位置后,点击“More”-“On-Chip Calibration” 右侧出现的弹窗中,在Speed速度选择上,如Depth质量下降明显时,建议选择“Slow”,如做Depth常规改善,可以选择“Fast”
确认放置在合适位置后,点击“More”-“On-Chip Calibration” 右侧出现的弹窗中,在Speed速度选择上,如Depth质量下降明显时,建议选择“Slow”,如做Depth常规改善,可以选择“Fast”

点击“Calibrate”启动校准,等待校准运行,反馈出校准结果。我们检查HC和FL HC的两项数值,根据场景一中所提到的标准值范围,进行“忽略”或“应用”的选择 
(3)理想场景:一个带纹理的平面目标
在具备打印条件的情况下,我们可以布置最佳的校准环境,打印下载文件中预备的校准纹理目标纸(下载文件PDF中有),将目标纸固定于墙上
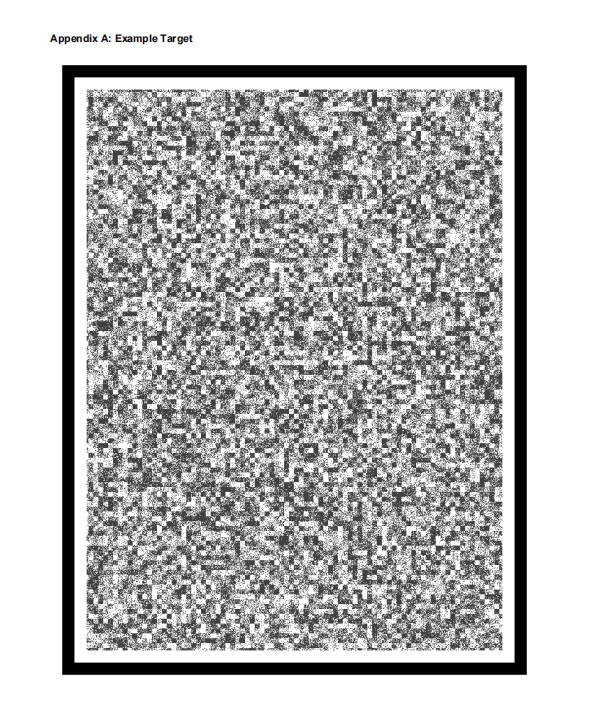
启动摄像头画面,对准纹理目标
点击“More”-“On-Chip Calibration” 右侧出现的弹窗中,同样的,在Speed速度选择中,如深度质量下降明显时,建议选择“Slow”,如做深度(质量)常规改善,可以选择“Fast”
点击“Calibrate”启动校准,等待校准运行,反馈出校准结果。我们检查HC和FL HC的两项数值,根据场景一中所提到的标准值范围,进行“忽略”或“应用”的选择。
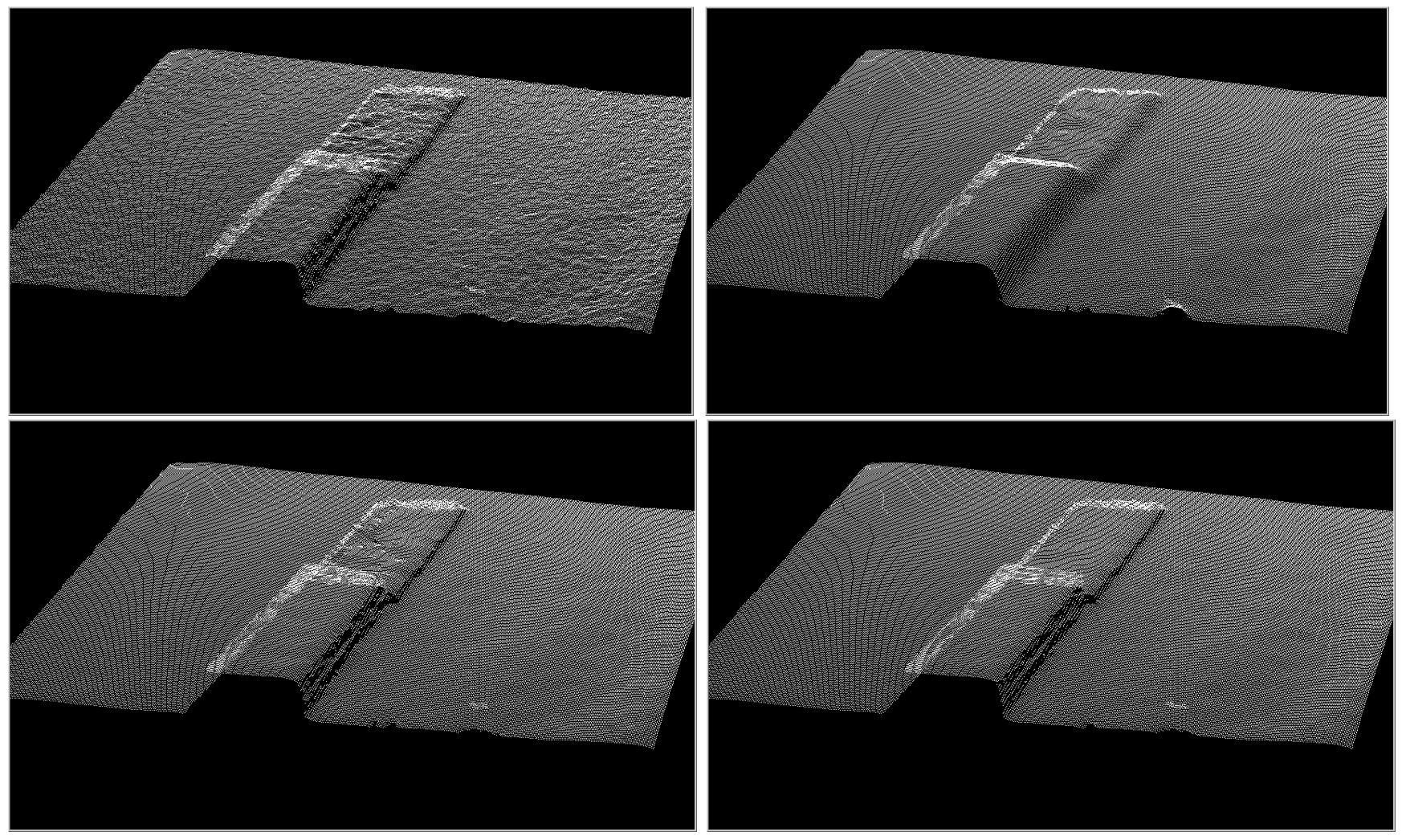
5.最后我们可以使用Depth Quality Tool深度质量工具,对校准后的精度进行对比