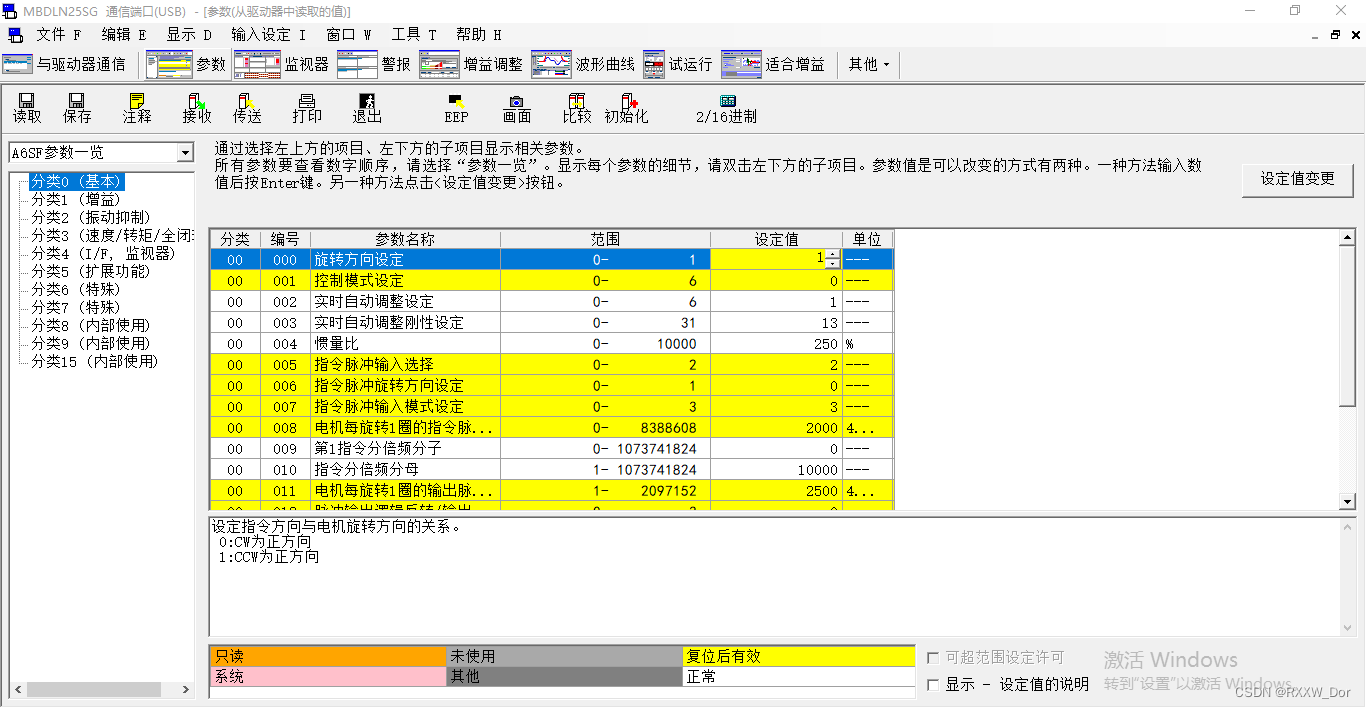
松下伺服电机一般都设置的参数简介如下:松下伺服参数共有200个,但一般的控制场合只需掌握少数几个即可,伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则多使用变频器,因为变频器性能已经足够满足要求了,而价格比伺服低。本项目即是用于定位控制。参数Pr000:伺服旋转方向切换,伺服驱动需要调换旋转方向,只需要将Pr000中的值由1改为0,或由0改为1。参数Pr001:伺服控制模式的设置,位置控制为缺省模式。参数Pr007:伺服控制脉冲输入方式,PLC发送高速脉冲给伺服驱动器,可以是正转一路脉冲,反转一路脉冲,也可以是只用一路脉冲,而增加一个方向控制信号,也可以是相位差的2相脉冲。参数Pr007分别设置为
1、
3、0或2,除设置为3只需一路脉冲就可实现定位控制,其他三者都需要两路脉冲,如果是两个轴控制,则必须将Pr007设置为3,缺省值为1,因此此参数一般都需要设置。当然此参数与Pr006配合设置,可选择输入的脉冲极性。参数Pr008:电机每旋转一圈所需要的指令脉冲,此参数涉及到PLC编程时,定位距离的精确控制,也就是PLC发的脉冲,伺服电机转一圈,电机带动丝杆旋转,丝杆的螺距假设是5mm,则PLC每发Pr008里设置的数值的脉冲,丝杆带动运动平台将移动5mm。参数Pr009和Pr010可实现同样的功能,适合于PLC脉冲数和移动距离不能整除的场合。参数Pr504:伺服定位,一般两端装有极限位的行程开关,需要设置Pr504由1设置为0,否则行程开关将不起作用。如果不需要极限位开关,则无需考虑此参数。