松下伺服电子齿轮比
电子齿轮比
电子齿轮比的作用
电子齿轮比就是对伺服接收到的上位机脉冲频率进行放大或者缩小。其中一个参数为分子,为电机编码器的分辨率;一个为分母,为电机旋转一圈所需要的脉冲数。如果分子大于分母就是放大,如果分子小于分母就是缩小。
电子齿轮比具有将上位控制器输入的脉冲指令与已设定的分倍频的比相乘的值作为位置控制部的位置指令的功能。通过此功能,可任意设定单位输入指令脉冲的电机旋转・移动量,由于上位控制 器的脉冲输出能力的限制,电机达不到所要的速度时,可以增大指令脉冲频率。
例如:同样一个伺服电机,如果连接了一个螺距为10mm的丝杠,那么电机转一 圈机械移动10mm,每移动0.001mm就需要电机转1/10000圈;而如果连接螺距为5mm的丝杠,每移动0.001mm需要电机转1/5000 圈。而电机编码器的分辨率是相同的,因此可以通过设置电子齿轮比来使电机脉冲数和机械最小移动量相匹配,这就是电子齿轮比的作用。
2
相关概念介绍
(1)编码器分辨率:伺服电机轴旋转编码器反馈脉冲数。
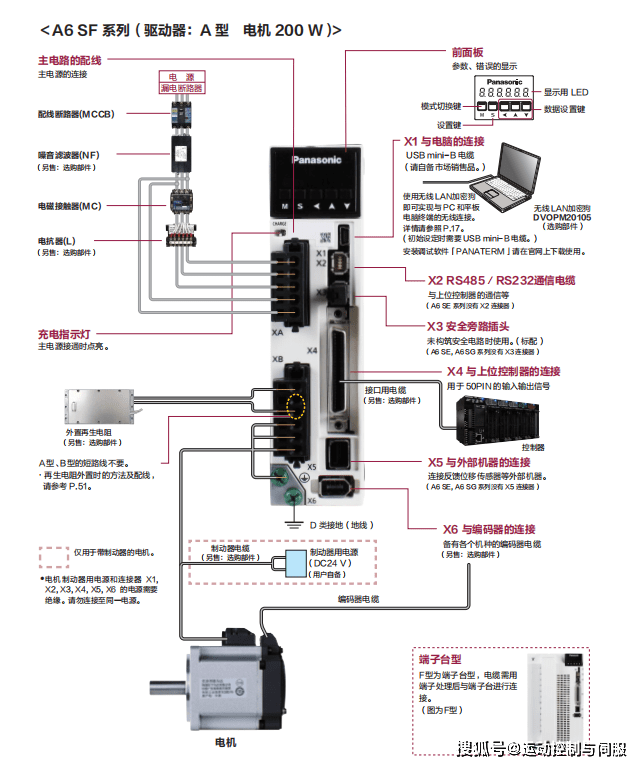
A6系列伺服为23位编码器,一圈8388608个编码器脉冲。
(2)指令脉冲:指的是上位PLC发送过来的脉冲数。
(3)脉冲当量:上位机发出一个脉冲时,丝杠移动的直线距离或旋转轴转动的度数,也是控制系统所能控制的最小距离。这个值越小,经各种补偿后越容易得到更高的加工精度和表面质量。当进给速度满足要求的情况下,可以设定较小的长度单位。
(4)螺距:螺纹上相邻两牙对应点之间的轴向距离。
3
A6系列电子齿轮比的设置
MINAS-A6、A6N系列,通过电机旋转1圈的脉冲数设定(Pr0.08),或者通过指令相关的电子齿轮比设定(Pr0.09,Pr0.10),请从上述两种方法中选择设定。
MINAS-A6B系列,未对应通过Pr0.08(电机每选择1圈的指令脉冲数)、Pr0.09(电子齿轮分子)、Pr0.10(电子齿轮分母)设定电子齿轮比,通过CoE(CiA402)所规定的对象608Fh(Position encoder resolution)、6091h(Gear ratio)、6092h(Feed constant)设定电子齿轮比。
在这里主要说明下A6、A6N系列如何设置电子齿轮比,A6B系列电子齿轮比设置可参考MINAS A6BE、BF系列 技术资料 -EtherCAT 通信规格篇。
可通过以下的参数设置电子齿轮比

电子齿轮比设置
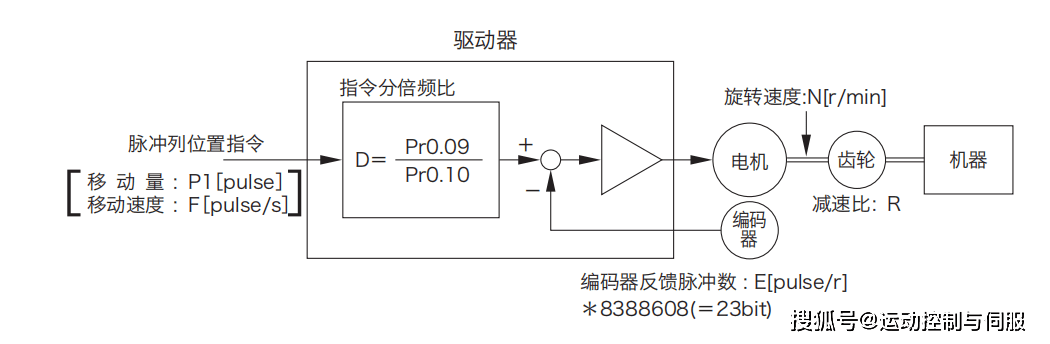
从图中可以看出A6系列的电子齿轮比的设置有两种方法,这两种方法的本质都是算出编码器分辨率与期望每转脉冲数的比值。
(1)电子齿轮比=编码器分辨率 / Pr0.08。Pr0.08即为期望每转脉冲数;
(2)当Pr0.08设定为0时,电子齿轮比=Pr0.09 / Pr0.10。
这几个参数的说明如图3所示:

相关参数说明
还有两点需要注意的是:
(1)电子齿轮比的取值范围是1/1000〜8000倍;
(2)仅可在伺服关闭状态下设置电子齿轮比。
4
电子齿轮比的计算及举例
举例1:伺服直连丝杆结构,丝杆螺距10mm,PLC发送10000个 脉冲电机转一圈.
指令脉冲当量:0.001mm/pulse
编码器脉冲当量:0.000001192mm/pulse
Pr0.08可以直接设置一圈的PLC指令脉冲数,则设置Pr0.08 =10000 即可
Pr0.09,Pr0.10常用在加入减速机,皮带的情景下,换算出的 电机每圈指令脉冲数不是整数时使用。
使用前,请将Pr0.08设为0。
举例2:皮带大小轮结构,比例1:3,大轮1圈行程16mm, 要求上位指令脉冲当量1μm/pulse,电子齿轮如何 设置?
解答:指令脉冲当量1μm/pulse,即PLC发送16000个脉冲 大轮转1圈,电机转3圈。
按照原来思路,Pr0.08=16000/3,除不尽了, 那么利用Pr0.09,Pr0.10
16000 × D = 8388608 × 3
D=Pr0.09/Pr0.10
则设置Pr0.09 =1572864
Pr0.10=10000
其他松下伺服文章可点击下列链接
松下MINAS A6家族
松下伺服总线产品(A6N系列/A6B系列)
松下A6伺服快速入门
相关文章

松下plcgr7安装序列号_向上一阶段跃进,松下 SZ5/SX2 对比、体验与心得
松下MINAS-A6伺服电机调试记录

松下LX5相机摄影技巧

[解决方案]罗技POWERPLAY鼠标垫无法连接G703/G903/G403等鼠标

罗技鼠标 903 底部按键是干嘛的,板载模式
罗技G903 左键双击问题