实际上can转电机是很简单的事情,但这个转电机却整了我一天的时间(汗颜汗颜),下面我会依遇到的问题进行一些分析提醒,文章最后会附带源码供参考。如果有不同意见欢迎评论留言(❤❤),如果你觉得本文章有用的话,可以点赞或者关注喔,后期一定会更新一些有用的文章的!
整体思路:这个代码是用定时器定时发送数据(也可以改到while)。
tim3配置:随便配一配就行(调皮)(调皮),
can配置:使用can1进行发送数据(时钟使用APB1,频率是36MHz,后面计算波特率会用到),IO口用PA11和PA12,PA11使用上拉输入,PA12使用复用推挽输出。 can的初始化放在下面:
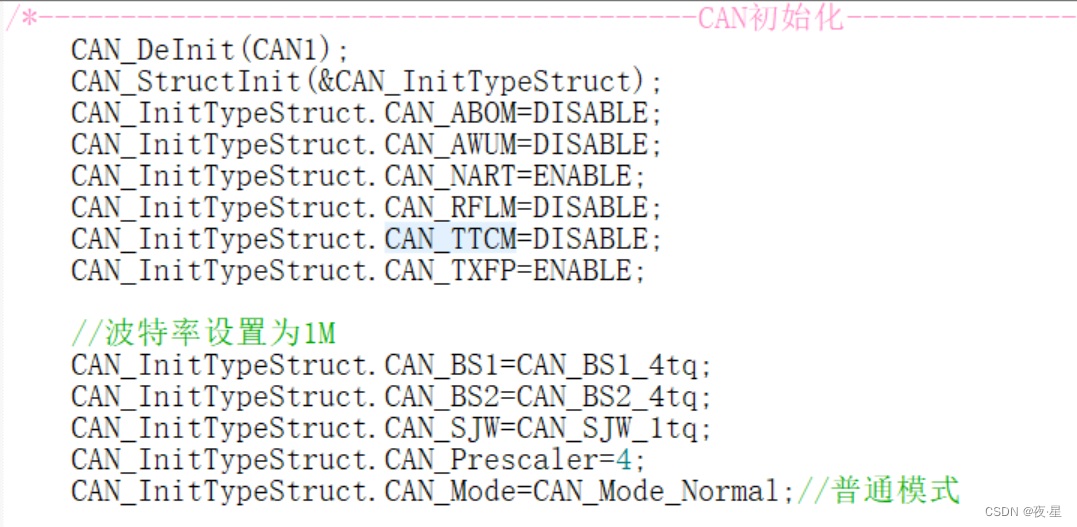
在配置的时候千万注意BS1,BS2,SJW和Prescaler这几个参数,这几个参数设置波特率,而且设置的波特率是否正确直接影响到电机能不能转电机!!!(这个破玩意整了我一天(哭)(哭))。这里给出波特率计算公式:波特率=APB1频率/Prescaler/(1+BS1+BS2),就上图的波特率:36MHz/4/(1+4+4)=1MHz。
实际上我转电机也是一个很偶然的事情,是有一个新生问,然后我找了找问题。在给他看代码的时候,我发现了下面这个:
他想接收来自电机的数据,但中断类型不对:

他使用的是STM32F103C8T6(普通型芯片)的板子,而CAN1_RX0_IRQn是定义在STM32F10X_CL(互联型芯片)下的,所以不能使用,需要用USB_LP_CAN1_RX0_IRQn这个中断,而中断向量则使用USB_LP_CAN1_RX0_IRQHandler。
链接:https://pan.baidu.com/s/119Sy1CsD2-HswqWNEBJnMA
提取码:1234