本教程展示如何在 Omniverse Isaac Sim 中导入 urdf
一. 使用内置插件导入urdf
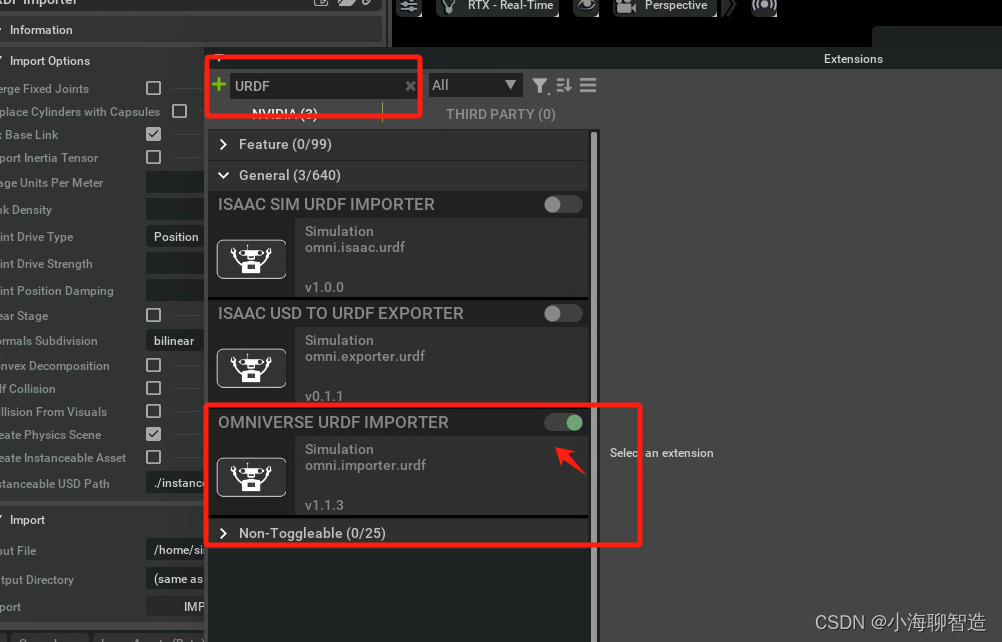
- 安装urdf 插件
方法是转到“window”->“Extensions”
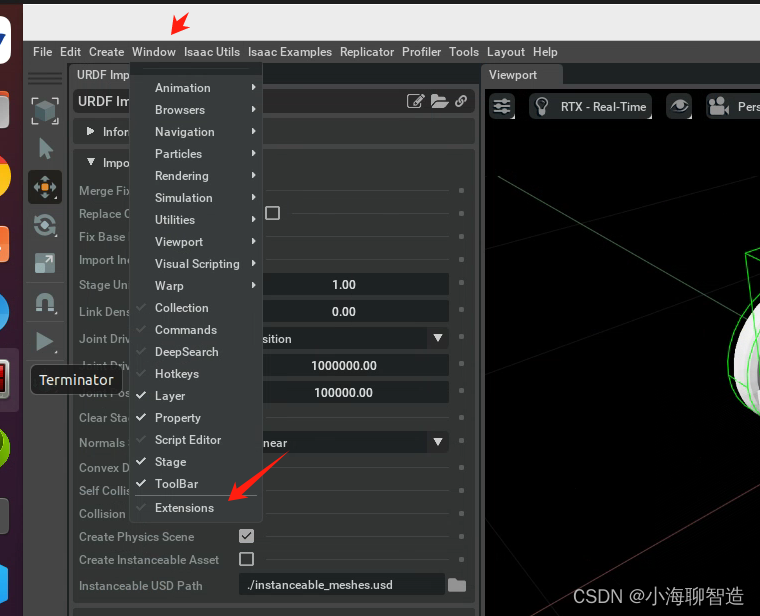
搜索框中输入urdf, 并启用
- 通过转至Isaac Utils -> Workflows -> URDF Importer菜单来访问 urdf 扩展。
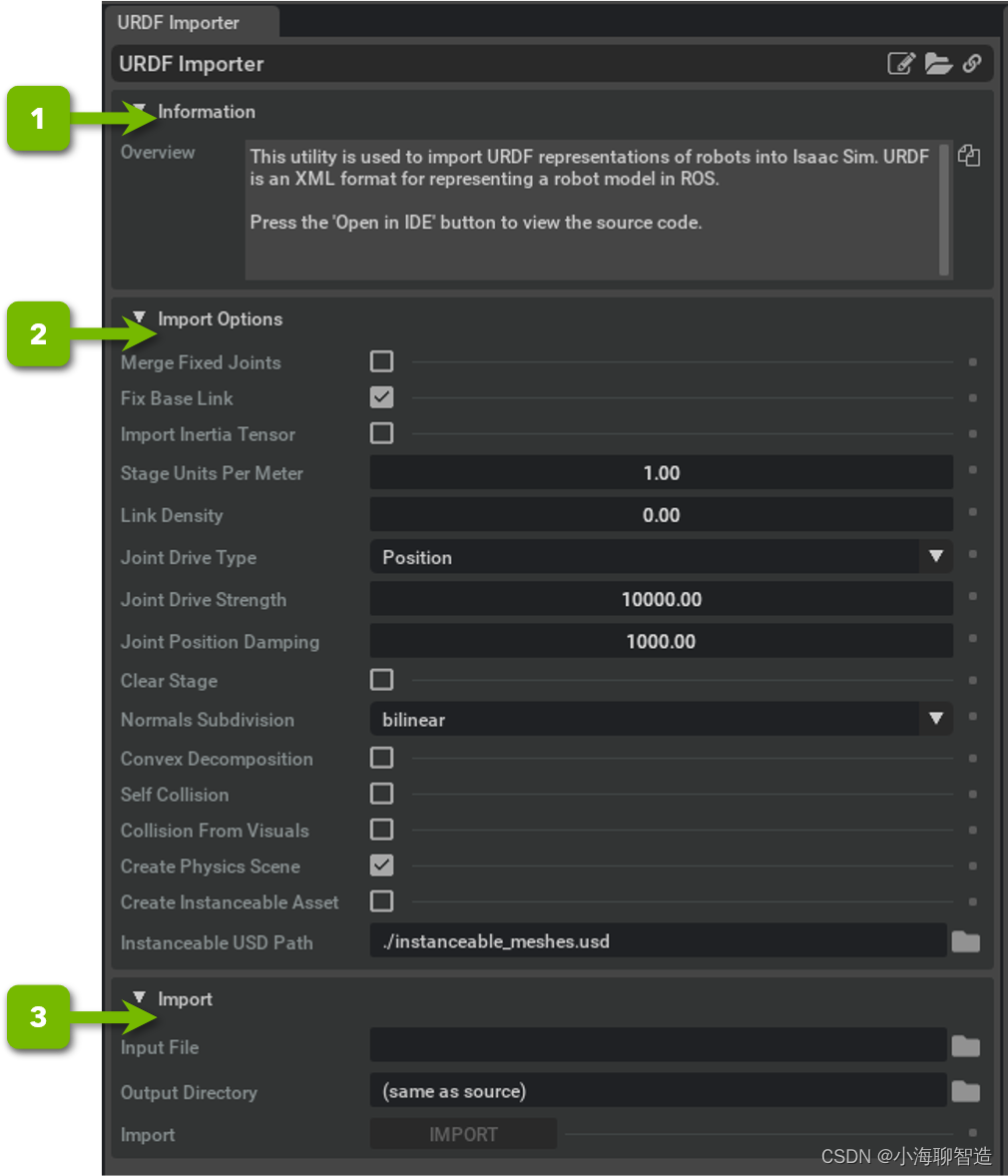
表格中的 1,2,3 对应着上图中的1,2,3 位置说明

导入选项
-
Merge Fixed Joins-合并固定关节:合并由固定关节连接的链接,以便关节仅应用于移动的关节。合并的框架仍将显示为它们合并到的父框架的子框架。
-
Replace Cylinders with Capsules-固定底座链接:选中后,机器人的底座将固定在世界坐标中的位置。
-
Fix base link-导入惯量张量:直接从 urdf 检查负载惯量。如果 urdf 未指定惯性张量,则将使用恒等式并按比例因子进行缩放。如果未选中,Physx 将自动计算。非对角惯性矩阵分量将用于计算主轴表示以及对角线。
-
Stage Units Per Meter- 每米舞台单位:Omniverse Kit 默认长度单位是厘米。您可以在此处设置比例因子以匹配 URDF 中使用的单位。目前,URDF 导入器仅支持统一的全局缩放。scale在未来的版本中将可以对不同的轴和特定的网格部分应用不同的缩放(即使用URDF 网格标签下的参数)。如果您scale的 URDF 中有一个参数,您可能需要手动调整 URDF 中的其他值,以便所有参数都采用相同的单位。
-
Link Density 链接密度:如果链接没有给定质量,则使用此密度(以 Kg/m^3 为单位)根据链接体积计算质量。值 0.0 也可用于告诉物理引擎自动计算密度。
-
Joint Drive Type-关节驱动类型:默认关节驱动类型,值可以是None、Position和Velocity。
-
Joint Drivre Strenght-关节驱动强度:驱动强度是位置驱动的关节刚度,或速度驱动关节的阻尼。
-
Joint Position Damping-关节位置驱动阻尼:如果驱动类型设置为位置,则这是使用的默认阻尼值。
-
Clear Stage-清除舞台:选中后,在加载新的 URDF 之前清理舞台,否则将其加载到位置(0,0,0)的当前打开舞台上
-
Normals Subdivision-法线细分:网格法线细分方案。如果导入的网格包含创作的法线,请选择“无”以避免覆盖它们。
-
Convex Decomposition -凸面分解:如果选中,碰撞对象将成为一组凸面网格,以更好地匹配视觉资源。否则将使用凸包。
-
Self Collision -自碰撞:启用相邻链接之间的自碰撞。如果碰撞网格在接头处相交,可能会导致不稳定。
-
Collision From Visuals-来自视觉的碰撞:如果碰撞没有被创作为自己的网格,请选中此选项以使用视觉网格来定义碰撞器。
-
Create Physics Scene-创建物理场景:在舞台上创建默认物理场景。由于该物理场景是在机器人资产外部创建的,因此不会将其加载到由机器人资产组成的其他场景中。
-
Create Instanceable Asset -创建可实例化资源:选择此选项可创建具有可实例化网格的资源。这对于包含同一机器人的多个实例的场景非常有用(例如强化学习任务)。
-
Instanceable USD Path-输出目录:导入资产的目的地。它将创建一个文件夹结构,其中包含机器人资源和用于渲染的所有纹理。您必须具有对此目录的写入权限
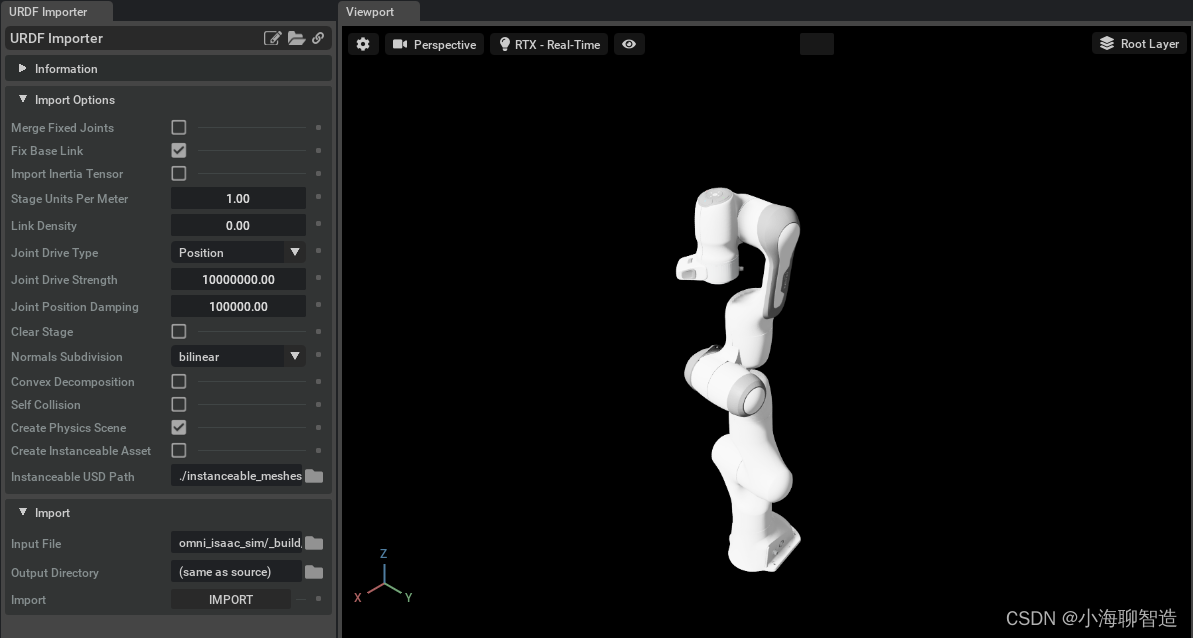
让我们指定要导入 Franka 的设置:
选中“修复基本链接”和“仅创建物理场景”旁边的框。
将舞台单位每米设置为1.0,这意味着资源将以米为单位导入
将关节驱动类型设置为“位置”
将关节驱动强度和关节位置驱动阻尼设置为10000000.0和100000.0
将输出目录设置为存储资产的位置(核心或本地)
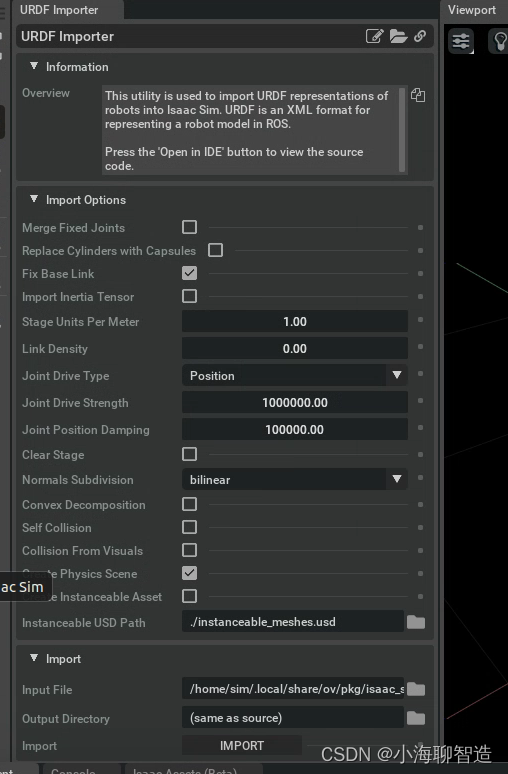
您必须对用于导入的输出目录具有写入权限,它将默认为当前打开的阶段,请根据需要更改此设置
导入urdf 文件
在导入选项卡下的文件输入文件框中,导航到所需的文件夹,然后选择所需的 URDF 文件。在此示例中,我们将使用 Franka panda_arm_hand.urdf文件,该文件包含在该扩展附带的内置 URDF Files/robots/franka_description/robots文件夹中。
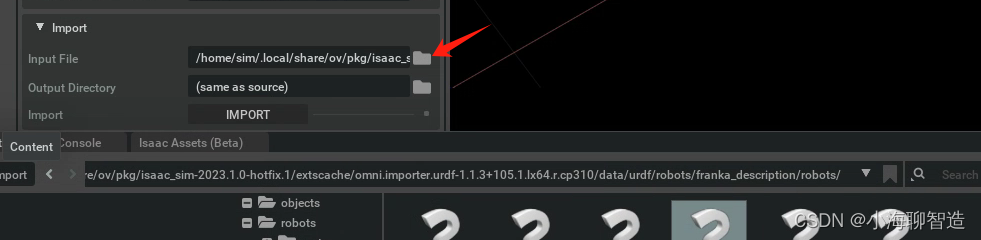
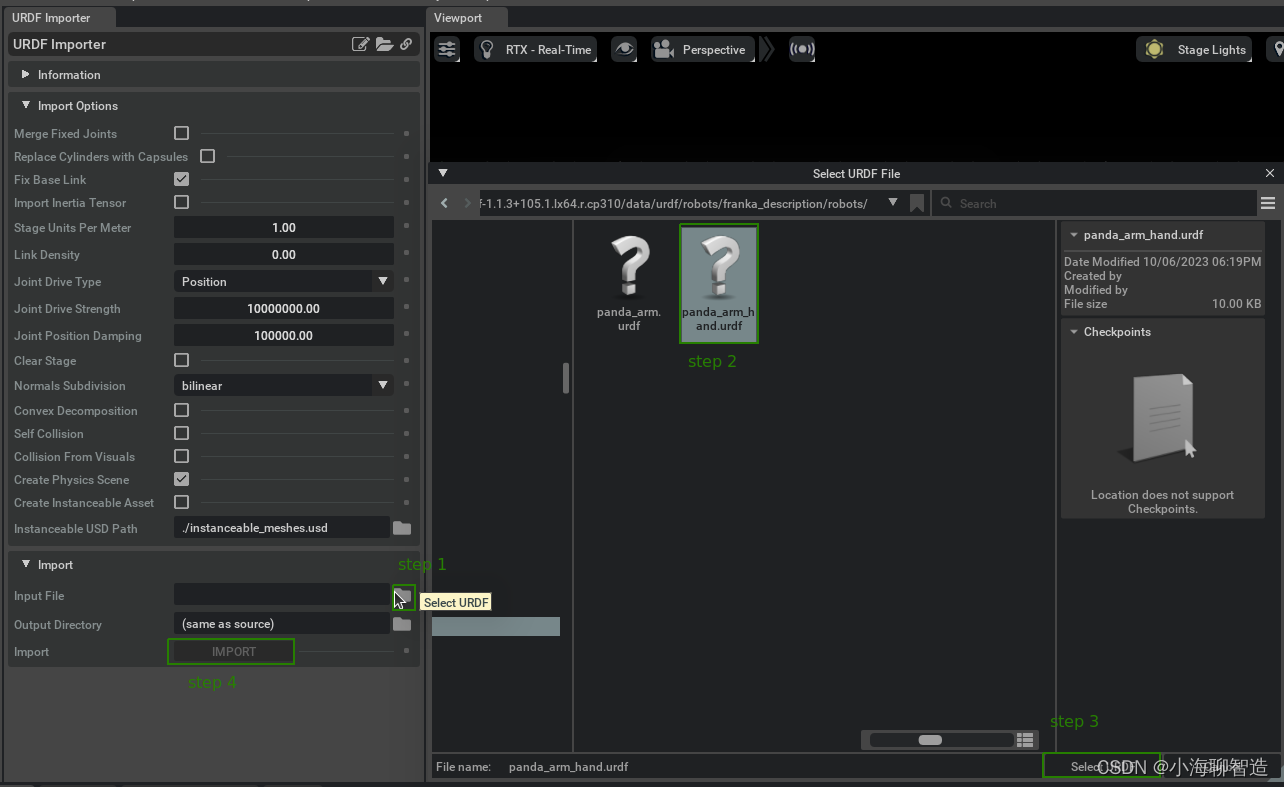
单击“IMPORT ”按钮 将机器人添加到舞台。
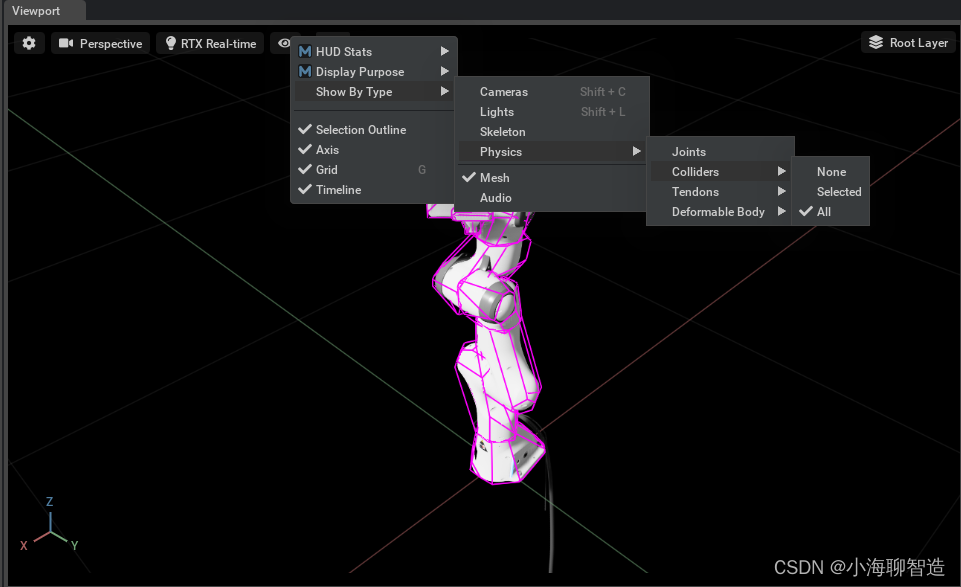
可视化碰撞网格
可视化碰撞网格,并非所有刚体都需要具有碰撞属性,并且碰撞网格与视觉网格相比通常是简化的网格。因此,您可能需要可视化碰撞网格以进行检查。要在任何视口中可视化碰撞:
选择:视口左上角的眼睛图标。

选择:Show By Type。
选择:Physics。
选择:Colliders。
选择 All 。
如果您要导入移动机器人,您可能需要更改以下设置
取消选中修复基本链接
将关节驱动类型设置为速度驱动
将关节驱动强度设置为所需的水平。请注意,这将作为关节的阻尼参数导入。在速度驱动模式下,关节刚度始终设置为 0。