FANUC机器人到达某个点位时,为什么不显示@符号?

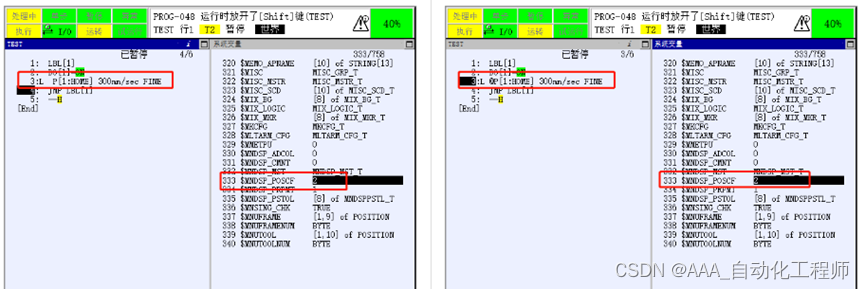
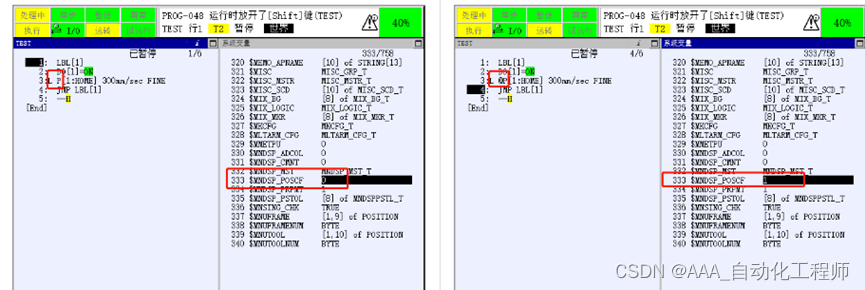
该功能由变量$MNDSP_POSCF = 0(不显示)/1(显示)/2(光标移动该行显示) 控制,该变量设置为不同的值,则启用对应的功能。
如下图所示,为该变量设置不同的值时的对比,
| 其他常用的系统变量可参考以下内容: |
| 在R寄存器指定速度时的预读 |
$RGSPD_PREXE = TRUE/FALSE(有效/无效)
-
R[1] = 300
-
L P[1] R[1]mm/s FINE
-
R[1] = 150
-
L P[2] R[1]mm/s FINE
预读有效时,R[1]所设定的速度不会改变,即第四行指令仍旧使用300的速度,类似于将R[1]的值只能进行初始化一次存储在当前TP程序内存中。