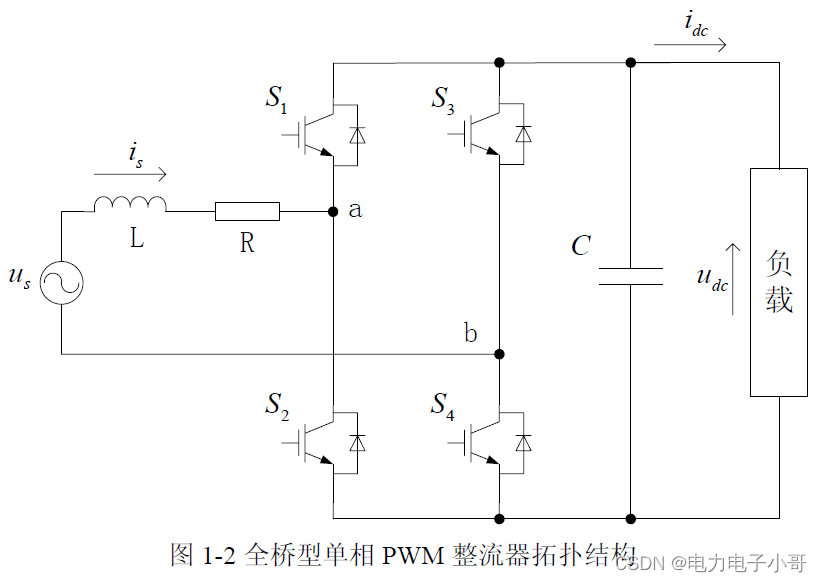
1. 单相整流器dq坐标系下建模
单相整流器的拓扑如图所示,可知 u a b = u s − L d i s d t − R i s {u_{ab}} = {u_{s}} - L\frac{{d{i_s}}}{{dt}} - R{i_s} uab=us−Ldtdis−Ris。
将电压和电流写成dq的形式。
{ u s = U s m sin ( ω t ) i s = I d sin ( ω t ) + I q cos ( ω t ) u a b = U d sin ( ω t ) + U q cos ( ω t ) \left\{\begin{array}{l} u_{\mathrm{s}}=U_{\mathrm{sm}} \sin (\omega \mathrm{t}) \\ i_{\mathrm{s}}=I_{\mathrm{d}} \sin (\omega \mathrm{t})+I_{\mathrm{q}} \cos (\omega \mathrm{t}) \\ u_{\mathrm{ab}}=U_{\mathrm{d}} \sin (\omega \mathrm{t})+U_{\mathrm{q}} \cos (\omega \mathrm{t}) \end{array}\right. ⎩ ⎨ ⎧us=Usmsin(ωt)is=Idsin(ωt)+Iqcos(ωt)uab=Udsin(ωt)+Uqcos(ωt)
将dq表达式代入 u a b = u s − L d i s d t − R i s {u_{ab}} = {u_{s}} - L\frac{{d{i_s}}}{{dt}} - R{i_s} uab=us−Ldtdis−Ris。需要注意的是,Idsin(wt)的求导包含两部分,一部分是对Id求偏导,另一部分是对sinwt求偏导。dq表达式中的其他项也是如此。
最终得到表达式。
{ U d = U s m − L d I d d t + I q ω L − R I d U q = 0 − L d I q d t − I d ω L − R I q \left\{ \begin{array}{l} {U_d} = {U_{sm}} - L\frac{{d{I_d}}}{{dt}} + {I_q}\omega L - R{I_d}\\ {U_q} = 0 - L\frac{{d{I_q}}}{{dt}} - {I_d}\omega L - R{I_q} \end{array} \right. {Ud=Usm−LdtdId+IqωL−RIdUq=0−LdtdIq−IdωL−RIq 上述的Ud和Uq是实际值,为了求得目标的Ud和Uq,以d轴为例,需要将PI控制器替代 L d I d d t + R I d L\frac{{d{I_d}}}{{dt}} +R{I_d} LdtdId+RId,能够得到以下表达式:
{ L d I d d t ≈ L I d r e f − I d T s = K p ( I d r e f − I d ) R I d = R L ∫ L d I d d t d t ≈ R L ∫ K p ( I d r e f − I d ) d t = K i ∫ ( I d r e f − I d ) d t K i = R L K p \left\{ \begin{array}{l} L\frac{{d{I_d}}}{{dt}} \approx L\frac{{{I_{dref}} - {I_d}}}{{{T_s}}} = {K_p}({I_{dref}} - {I_d})\\ R{I_d} = \frac{R}{L}\int L{\frac{{d{I_d}}}{{dt}}} dt \approx \frac{R}{L}\int {{K_p}({I_{dref}} - {I_d})} dt = {K_i}\int {({I_{dref}} - {I_d})} dt\\ {K_i} = \frac{R}{L}{K_p} \end{array} \right. ⎩ ⎨ ⎧LdtdId≈LTsIdref−Id=Kp(Idref−Id)RId=LR∫LdtdIddt≈LR∫Kp(Idref−Id)dt=Ki∫(Idref−Id)dtKi=LRKp
同理, L d I q d t + R I q L\frac{{d{I_q}}}{{dt}} +R{I_q} LdtdIq+RIq也能得到类似的表达式。简单来看就是用PI控制器代替目标的电感电压,由于整流器本质上控制的是端口电压,而端口电压又是和电网电压,电感电压形成矢量三角形的,所以控制电感电压本质上就是控制电感电压。
将PI的表达式代入Ud和Uq表达式中,得到:
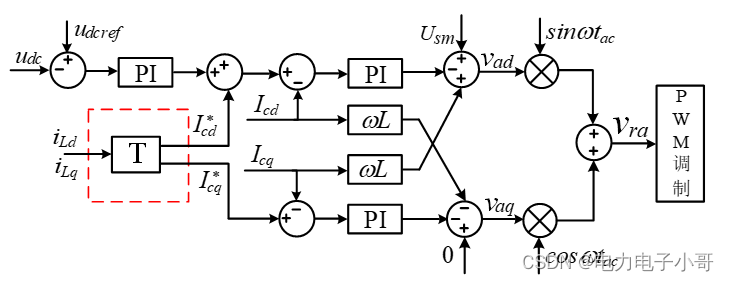
{ U d ∗ = U s m + I q ω L − K p ( I d r e f − I d ) − K i ∫ ( I d r e f − I d ) d t U d ∗ = 0 − I d ω L − K p ( I q r e f − I q ) − K i ∫ ( I q r e f − I q ) d t \left\{\begin{array}{l} U_{d}^{*}=U_{s m}+I_{q} \omega L-K_{p}\left(I_{d r e f}-I_{d}\right)-K_{i} \int\left(I_{d r e f}-I_{d}\right) d t \\ U_{d}^{*}=0-I_{d} \omega L-K_{p}\left(I_{q r e f}-I_{q}\right)-K_{i} \int\left(I_{q r e f}-I_{q}\right) d t \end{array}\right. {Ud∗=Usm+IqωL−Kp(Idref−Id)−Ki∫(Idref−Id)dtUd∗=0−IdωL−Kp(Iqref−Iq)−Ki∫(Iqref−Iq)dt
控制框图如图所示。
2. 单相APFdq坐标系下特定次谐波抑制
单相APF的拓扑如图所示,变换器的目标是补偿电流ic等于iL中谐波电流相反数,由于is=iL+ic,因此is谐波电流为0,由于APF的容量有限,往往仅仅需要补偿低次谐波,就能够达到不错的补偿效果,所以特定次谐波补偿的需求应运而生。

参考上面的dq解耦控制,可以得到5次谐波抑制的控制表达式,需要注意的是,补偿谐波电流的参考值是负的谐波负载电流,所以 I c 5 d I_{c5d} Ic5d的参考值是 − I L 5 d -I_{L5d} −IL5d。
{ U 5 d ∗ = U s m + I c 5 q ω L − K p ( − I L 5 d − I c 5 d ) + K i ∫ ( − I L 5 d − I c 5 d ) d t U 5 q ∗ = 0 − I c 5 d ω L − K p ( − I L 5 q − I c 5 q ) + K i ∫ ( I L 5 q + I c 5 q ) d t \left\{\begin{array}{l} U_{5d}^{*}=U_{s m}+I_{c5q} \omega L-K_{p}\left(-I_{L5d}-I_{c5d}\right)+K_{i} \int\left(-I_{L5d}-I_{c5d}\right) d t \\ U_{5q}^{*}=0-I_{c5d} \omega L-K_{p}\left(-I_{L5q}-I_{c5q}\right)+K_{i} \int\left(I_{L5q}+I_{c5q}\right) d t \end{array}\right. {U5d∗=Usm+Ic5qωL−Kp(−IL5d−Ic5d)+Ki∫(−IL5d−Ic5d)dtU5q∗=0−Ic5dωL−Kp(−IL5q−Ic5q)+Ki∫(IL5q+Ic5q)dt
重新整理表达式,得:
{ U 5 d ∗ = U s m + I c 5 q ω L + K p ( I L 5 d + I c 5 d ) + K i ∫ ( I L 5 d + I c 5 d ) d t U 5 q ∗ = 0 − I c 5 d ω L + K p ( I L 5 q + I c 5 q ) + K i ∫ ( I L 5 q + I c 5 q ) d t \left\{\begin{array}{l} U_{5d}^{*}=U_{s m}+I_{c5q} \omega L+K_{p}\left(I_{L5d}+I_{c5d}\right)+K_{i} \int\left(I_{L5d}+I_{c5d}\right) d t \\ U_{5q}^{*}=0-I_{c5d} \omega L+K_{p}\left(I_{L5q}+I_{c5q}\right)+K_{i} \int\left(I_{L5q}+I_{c5q}\right) d t \end{array}\right. {U5d∗=Usm+Ic5qωL+Kp(IL5d+Ic5d)+Ki∫(IL5d+Ic5d)dtU5q∗=0−Ic5dωL+Kp(IL5q+Ic5q)+Ki∫(IL5q+Ic5q)dt
由于 U s m U_{s m} Usm, I 5 d ω L I_{5d} \omega L I5dωL, I 5 q ω L I_{5q} \omega L I5qωL稳态时为常数,并且可以由后面的PI控制器生成,所以实际应用中可以忽略。得到以下表达式:
{ U 5 d ∗ = K p ( I L 5 d + I c 5 d ) + K i ∫ ( I L 5 d + I c 5 d ) d t U 5 q ∗ = K p ( I L 5 q + I c 5 q ) + K i ∫ ( I L 5 q + I c 5 q ) d t \left\{\begin{array}{l} U_{5d}^{*}=K_{p}\left(I_{L5d}+I_{c5d}\right)+K_{i} \int\left(I_{L5d}+I_{c5d}\right) d t \\ U_{5q}^{*}=K_{p}\left(I_{L5q}+I_{c5q}\right)+K_{i} \int\left(I_{L5q}+I_{c5q}\right) d t \end{array}\right. {U5d∗=Kp(IL5d+Ic5d)+Ki∫(IL5d+Ic5d)dtU5q∗=Kp(IL5q+Ic5q)+Ki∫(IL5q+Ic5q)dt
再经过dq反变换,得到: U 5 ∗ = U 5 d ∗ sin ( 5 ω t ) + U 5 d ∗ cos ( 5 ω t ) U_5^* = U_{5d}^*\sin (5\omega t) + U_{5d}^*\cos (5\omega t) U5∗=U5d∗sin(5ωt)+U5d∗cos(5ωt),将 U 5 ∗ U_5^* U5∗加入到基波电流控制的调制波中,就能实现谐波补偿的功能。
3. 单相整流器dq坐标系下特定次谐波抑制
单相整流器由于存在直流电压二次纹波,经过调制,从而使电网电流产生3次谐波电流,为了抑制电网电流的3次谐波,可以参考APF的谐波补偿思想,假设负载5次谐波电流为零,则补偿的五次谐波电流参考值为0,从而可得到以下表达式:
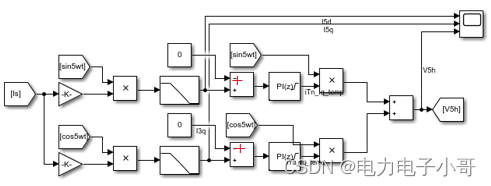
{ U 5 d ∗ = K p ( 0 + I c 5 d ) + K i ∫ ( 0 + I c 5 d ) d t U 5 q ∗ = K p ( 0 + I c 5 q ) + K i ∫ ( 0 + I c 5 q ) d t \left\{\begin{array}{l} U_{5d}^{*}=K_{p}\left(0+I_{c5d}\right)+K_{i} \int\left(0+I_{c5d}\right) d t \\ U_{5q}^{*}=K_{p}\left(0+I_{c5q}\right)+K_{i} \int\left(0+I_{c5q}\right) d t \end{array}\right. {U5d∗=Kp(0+Ic5d)+Ki∫(0+Ic5d)dtU5q∗=Kp(0+Ic5q)+Ki∫(0+Ic5q)dt
控制框图如图所示,将5次谐波抑制的调制波加入到基波控制器的调制波中,实现了5次谐波电流抑制的功能。
4. 三相系统特定次谐波抑制
和单相系统的唯一区别就是abc-dq,和dq-abc矩阵的差异,建模思想完全通用。
5. 参考文献
[1] 三相并联型有源电力滤波器电流重复控制_耿攀
[2] 并联型有源电力滤波器按容量比例分频段补偿并联控制策略_张树全
[3] 多同步旋转坐标系下指定次谐波电流控制_张树全
6. 反馈与建议
- 邮箱:upqcyjp@q63.com