本作品介绍参与极术社区的有奖征集|分享研电赛作品扩大影响力,更有重磅电子产品免费领取!
参赛单位:上海大学
参赛队伍:蓝蛙
指导老师:李楠
参赛队员:陈庆泰 毛昊强 周开勋
获奖情况:全国总决赛二等奖
作品简介
农业机器人技术作为农业智能装备技术的重要组成部分,受到国内外研究工作者的广泛关注。然而当前的农业机器人平台主要由工业、商业和科研机器人平台改装而成,这些平台在工作时不能完全满足农田环境作业要求,因此需要针对农田环境特点设计适宜构型的农业机器人移动平台。
研究内容
本作品针对于大田和大棚场景设计了一款农业机器人平台,可搭载不同作业设备,完成不同的作业任务。
本作品现已研究制作了喷药执行机构和机械除草作业机构。喷药作业相较于常规的无人机喷药,续航能力强,受风的干扰小,作业效率高,且该平台可在温室大棚内进行作业,而无人机在大棚内喷药作业困难。
本作品的主要研究内容如下:
- 研究了当前主流的农业机器人平台,选定结构简单、行走灵活、转向方式多样化的轮式机器人作为本次研究的课题。
- 从软硬件开发的角度详细介绍了机器人的各个模块的需求,根据实际工程提出对这些需求的解决方案,初步完成机器人硬件模块的设计。
- 机器人运动系统调试。完成四轮机器人硬件平台的搭建,调试电机控制器的算法和参数。然后通过主控制器发出指令,控制机器人完成转向运动、平台水平调整等动作。
- 利用搭载的摄像头、UWB和GPS等传感器,基于机器视觉、路径规划和路径跟踪等技术,实现农业机器人平台的自主行走,完成整个农田的覆盖,为搭载多种作业工具进行作业奠定了基础。
- 利用搭载的360度可旋转的监控摄像头和图传摄像头,实现远程监控和遥控,并为状态监测端、监测web端开发了一系列的软件。研究如何打通各个子系统的数据交互的方案,设计了一套人机交互友好,美观的交互页面。
创新点和难点
1.创新点
(1)机器人行走采用四轮驱动,能够完成前轮转向、四轮转向、蟹型转向和原地旋转四种控制方式,能够减小机器人的运动半径,使得机器人能够在狭小的空间中作业。
(2)对农作物行识别算法进行了研究,去除作物行间杂草等干扰,实现对农作物行的稳定准确识别。
(3)基于摄像头、GPS和UWB等传感器,采集机器人平台周边环境数据,完成自动导航模式下的路径规划,实现了在成行农作物间自主行走及整块农田的全覆盖自主作业。
(4)远程监控系统设计,实现远程状态监测与运动控制。基于JavaEE开发一个统一的后端,构建远程监测框架,并在此基础上扩展出数据统计、用户管理等服务。
2.难点
(1)机器人采用四轮驱动,每一个轮子都需要一个转向电机与轮毂电机进行控制,工作量大且控制结构复杂。
(2)各个控制子系统的控制、通信方式和协议的确定。
(3)农作物识别算法的准确性和稳定性的研究。
(4)摄像头、UWB、GPS和超声波等多种传感器的使用和融合。
(5)远程监控系统的设计、页面响应速度、大量数据并发接收存储。
整体方案
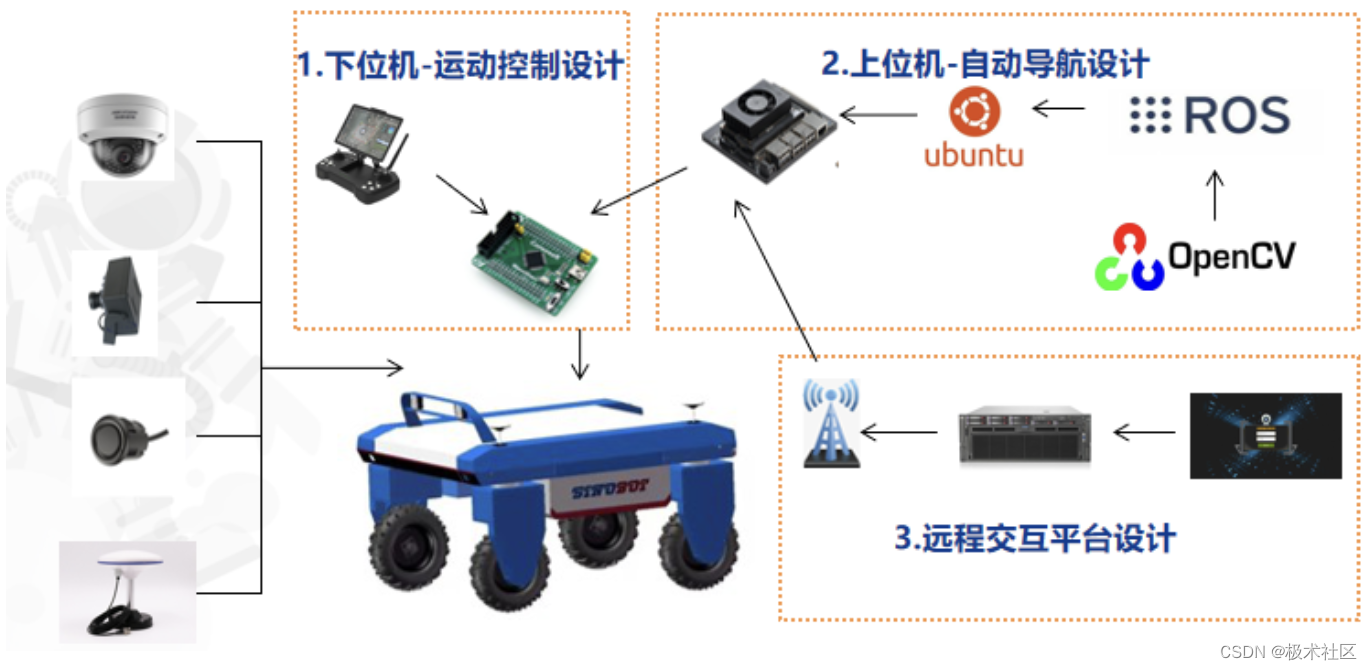
智能农业机器人平台由运动控制模块、自动导航模块和远程监控遥控模块组成。其总体结构设计图如下:

运动控制系统主要执行四个任务:对机器人进行实时运动控制,保证稳定的田间行驶和作业;实时监控机器的工作状态,例如行驶速度、转弯半径、电池状态等;实现简单的人机交互;和上位机建立通信,接收控制命令并上传状态反馈。
运动控制器平台硬件主要包括STM32F407微控制器、CAN总线接口、USB串口、UART超声波串口、开关量输入输出接口、模拟量输入接口等部分。其中,CAN接口连接了无刷电机控制器、光电编码器、电池管理模块和作业单元。
未来展望
1.现阶段机器人的远程图传系统,仅仅显示摄像头的图像,接下来将自主开发手机APP,不仅显示摄像头的图像,还可以显示规划的路径与实时路径,以及机器人的自身的状态,例如剩余电池量、速度等信息。
2.研究故障诊断算法,实现状态数据和故障信息的储存与显示,帮助用户及时排除故障,保证机器人稳定准确运行。
3.现阶段安装的超声波传感器,仅仅能检测到较大的障碍物,且不能自动躲避障碍物,未来将会安装激光雷达传感器,检测障碍物并局部路径规划躲避障碍物。
4.开发设计与机器人配套的作业机构,实现该机器人平台的最大化利用。
更多研电赛作品请查看2021年研电赛获奖作品合集