AVLTree原理:
AVLTree是高度平衡二叉树,每一个节点的左右子树高度差都小于2,这是AVLTree高度平衡的由来,他是在平衡二叉树的基础上进行特殊的处理(旋转:如果该节点不满足高度平衡二叉树的特点就进行旋转 旋转目的是为了调整该节点左右子树高度差 促使其达到高度平衡二叉树)
AVLTree节点之间是通过三叉链(里面存有三个节点:_parent,_left,_right)进行链接的 这样做为了更好的用迭代器去遍历二叉树
AVLTree缺点也很明显,旋转次数太多,但红黑树旋转就较少,所以AVLTree树的建立较耗时间,红黑树肯会更优。
补充:AVLTree就是为了更好的搜索查找而设计的,根据树的特点,深度越深所存的值就越多,查找也就越快,所以说该树主要为查找而生,实现删除功能会逆着之前的步骤进行调整,所以没有实现。我感觉重建二叉树也不会太费时间。
平衡原理:
该篇AVLTree是通过平衡因子(balance fact)进行调整;
平衡因子取值:0,1/-1,2/-2;
通过左树新增节点父亲的平衡因子“--” 右树新增节点父亲的平衡因子“++”
当父亲的平衡因子为2/-2时;说明左右子树高度差已经等于2了,不满足高度平衡二叉树,此时就要进行相应的旋转,如何进行旋转待会再细说。
当父亲的平衡因子为1/-1时;继续向上更新,因为以该节点为根的树,还是高度平衡二叉树,但是不保证新增的节点对他的祖先不产生影响,有可能他的祖先平衡因子会变成2/-2,这样就会发生上述的旋转,所以要进行向上更新。
平衡二叉树的主要难点就是旋转 旋转搞清楚就没什么困难了。
平衡二叉树的旋转:
之前就提到过旋转是调整以该节点,为旋转轴的子树的高度,所以说旋转之后该树已经是平衡二叉树了,所以不用再向上更新平衡因子。平衡因子会在每次旋转之后进行更新。
注意:AVLTree旋转使创始者规定的,这样做肯定是更好的,所以不要产生疑问,如为什么要这样旋转,为什么不是那样旋转?必须遵循AVLTree的旋转规则,一步一步画图去走。
我的建议:看懂以后,需要反复去练习,这里面运用的知识还是挺多的,如树,平衡二叉树,节点之间的链接(与链表链接十分相似),大大提高知识的运用与理解。
右旋:
右旋示例图:
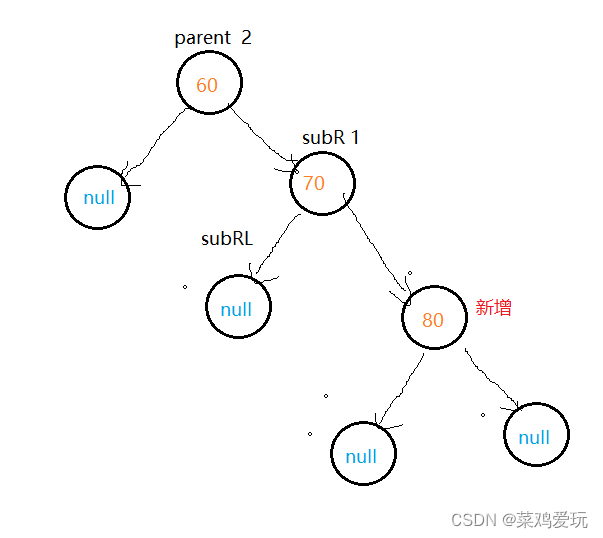
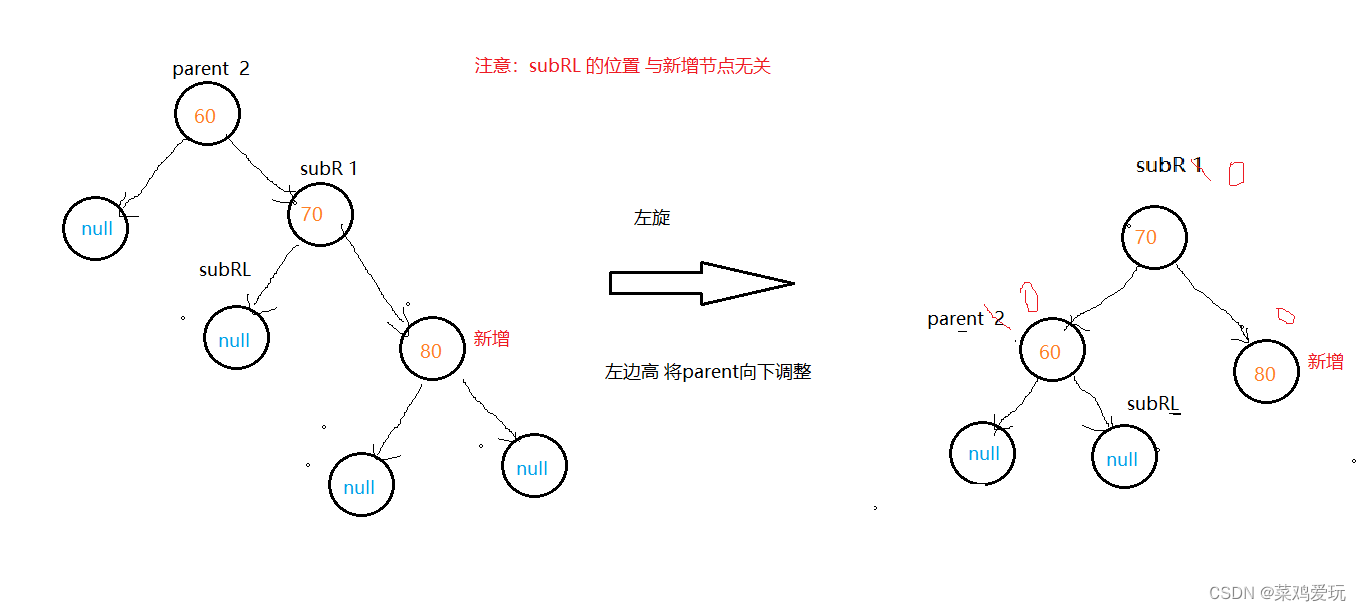
右边高了,必须使右边降下来,构成平衡二叉树,旋转过程如下图:
代码如下:
void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;//建立parent与subRL之间的关系parent->_right = subRL;if (subRL){subRL->_parent = parent;}//建立parent与subR之间的关系Node* ppNode = parent->_parent;parent->_parent = subR;subR->_left = parent;if (ppNode == nullptr){_root = subR;subR->_parent = nullptr;}else{if (ppNode->_left == parent){ppNode->_left = subR;}else{ppNode->_right = subR;}subR->_parent = ppNode;}subR->bf = parent->bf = 0;//平衡因子的更新}平衡因子更新如上图所示,根据旋转之后的图,调整平衡因子。
左旋:
左旋示例图:
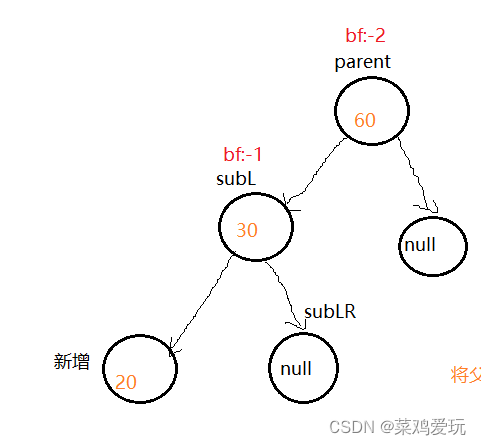
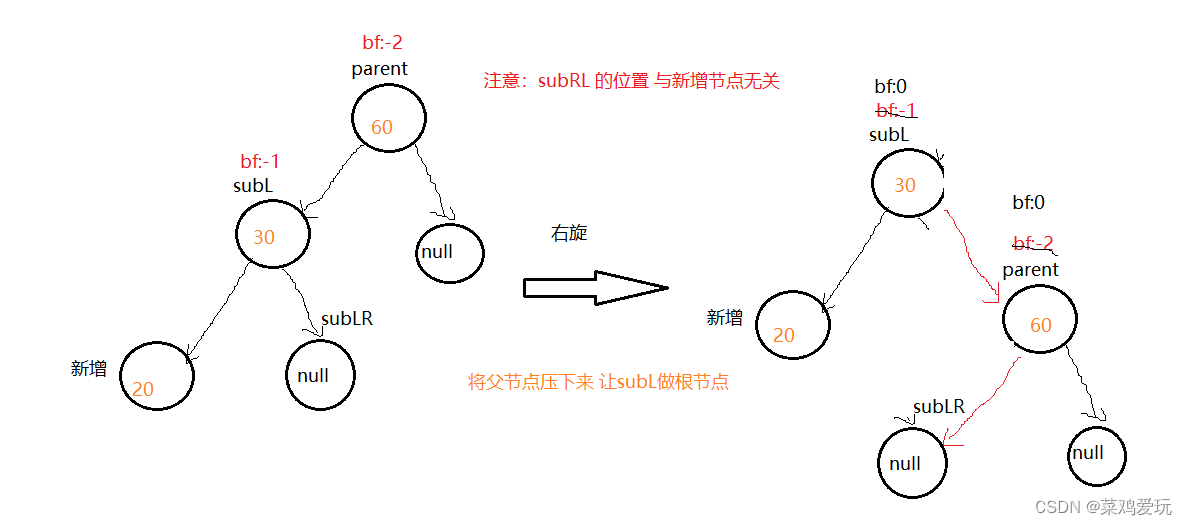
左边高了,必须使左边降下来,构成平衡二叉树,旋转过程如下图:
代码如下:
void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR){subLR->_parent = parent;}Node* ppNode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (ppNode == nullptr){_root = subL;subL->_parent = nullptr;}else{if (ppNode->_left == parent){ppNode->_left = subL;}else{ppNode->_right = subL;}subL->_parent = ppNode;}subL->bf = parent->bf = 0;}平衡因子更新如上图所示,根据旋转之后的图,调整平衡因子。
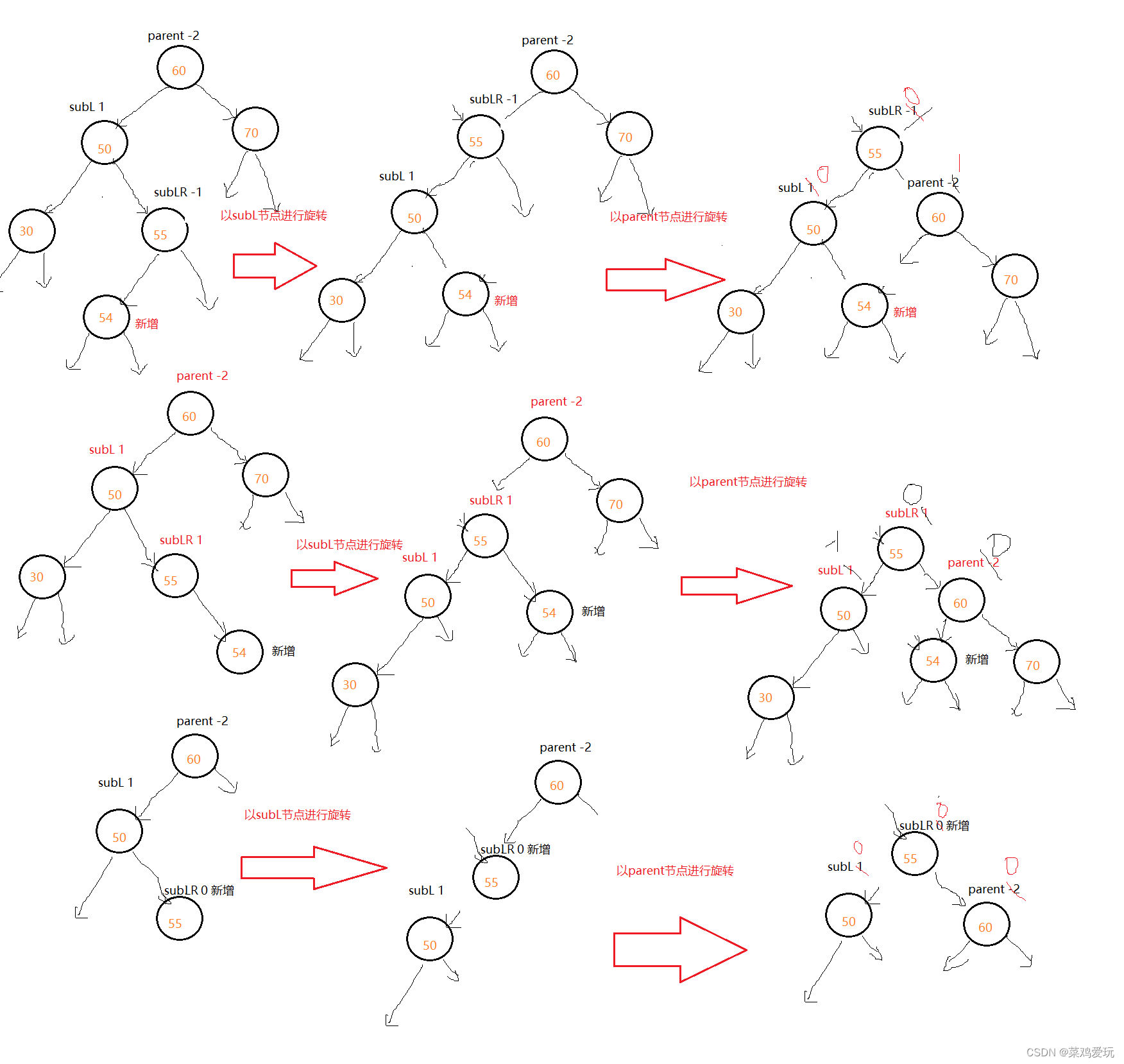
左右旋:
该新增节点使根节点的左右子树不能构成平衡二叉树,需要进行旋转调整高度差,旋转过程如下图:
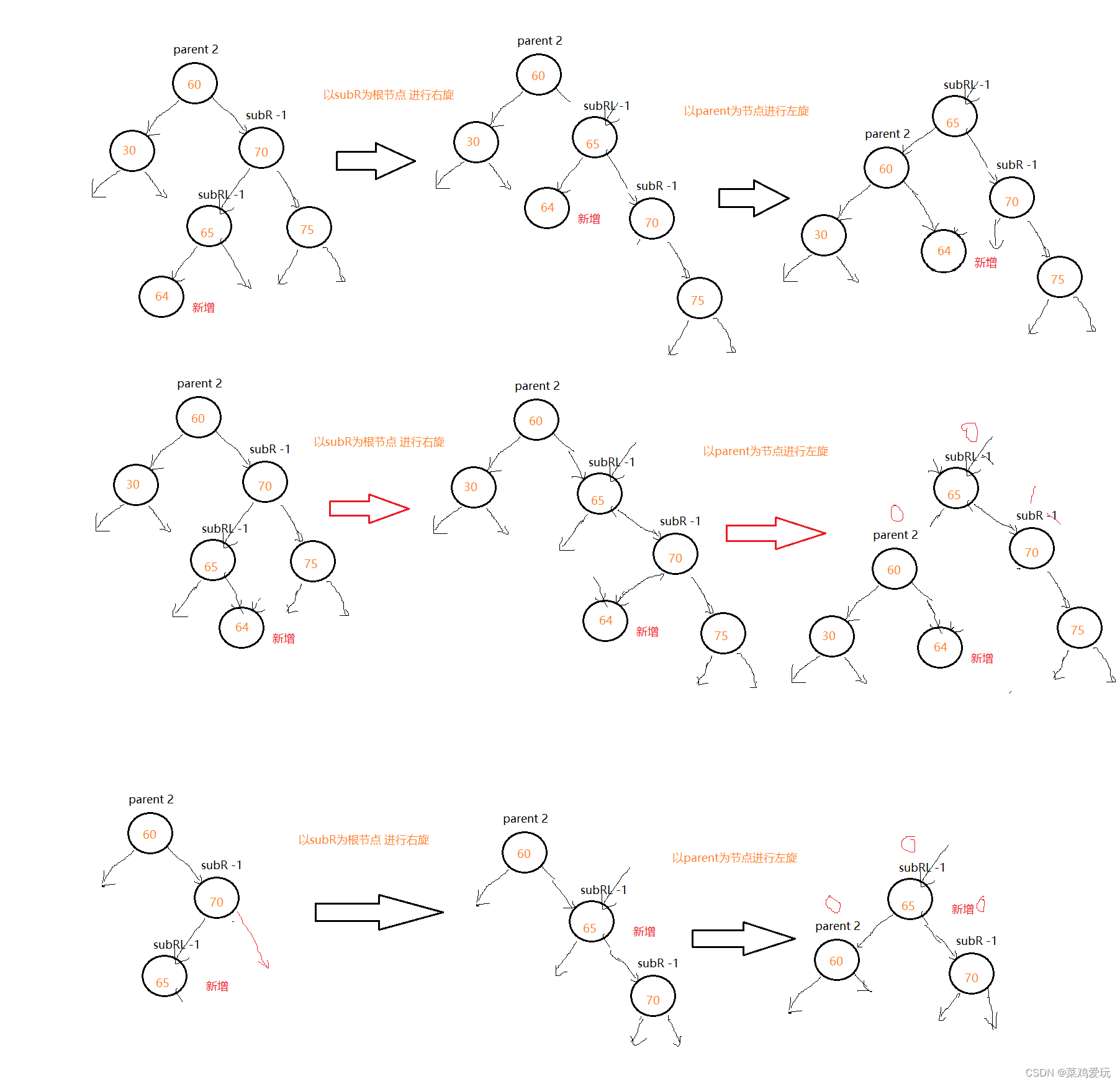
没有更新旋转过程的平衡因子,但是每个旋转函数中,都会对平衡因子进行更新,只是我没有在图上更新,旋转最终平衡因子可以根据图去更新
上面三种图,对应代码中三种情况的平衡因子更新,可能顺序有点乱。
代码如下:
void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->bf;RotateL(subL);//左旋RotateR(parent);//右旋if (bf == -1)//左子树新增{subLR->bf = 0;subL->bf = 0;parent->bf = 1;}else if (bf == 1)//右子树新增{subLR->bf = 0;subL->bf = -1;parent->bf = 0;}else if (bf == 0)//本身就是新增{subLR->bf = 0;subL->bf = 0;parent->bf = 0;}else{assert(false); }}右左旋:
该新增节点使根节点的左右子树不能构成平衡二叉树,需要进行旋转调整高度差,旋转过程如下图:
没有更新旋转过程的平衡因子,但是每个旋转函数中,都会对平衡因子进行更新,只是我没有在图上更新,旋转最终平衡因子可以根据图去更新
上面三种图,对应代码中三种情况的平衡因子更新,可能顺序有点乱。
代码如下:
void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->bf;RotateR(subR);//右旋RotateL(parent);//左旋if (bf == -1)//左子树新增{subRL->bf = 0;subR->bf = 1;parent->bf = 0;}else if (bf == 1)//右子树新增{subRL->bf = 0;subR->bf = 0;parent->bf = -1;}else if(bf == 0)//本身是新增{subRL->bf = 0;subR->bf = 0;parent->bf = 0;}else{assert(false);}}以上是平衡二叉树的旋转代码实现,如果不对请指教,
平衡二叉树的遍历:
平衡二叉树的遍历采用中序遍历,原因是平衡二叉树左子树始终小于根节点,根节点始终小于右子树,而中序遍历正好是:左,中,右,正好是升序遍历所以采用中序遍历
void Inorder(){_Inorder(_root);}void _Inorder(Node* root){if (root == nullptr){return;}_Inorder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_Inorder(root->_right);}平衡二叉树的判断:
平衡二叉树:左右子树高度差不超过1。
LCR 175. 计算二叉树的深度
平衡因子:就是右子树高度减左子树高度,其差值(可正负)就是平衡因子。
LCR 176. 判断是否为平衡二叉树
同时上面两个条件也可以做两个题。
int Height(Node* root){if (root == nullptr){return 0;}int lh = Height(root->_left);int rh = Height(root->_right);return lh > rh ? lh + 1 : rh + 1;}bool IsBalance(){return _IsBalance(_root);}bool _IsBalance(Node* root){if (root == nullptr){return true;}int lh = Height(root->_left);int rh = Height(root->_right);if (rh - lh != root->bf){cout << "平衡因子异常" << endl;return false;}return abs(rh - lh) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);}以上是通过平衡因子进行判断旋转,有的可能是通过计算该节点左右子树的高度差进行旋转,道理是一样的,平衡因子就是右子树高度减左子树高度得到的值(可正负)。
以上就是AVLTree的重要内容,有什么疑惑或者文章错误请指教~
下期发布红黑树讲解