1. 电机控制
{ 单电机参数:位置/角位移(方向)环、速度环(加减速、最大速度、启停速)、扭/转矩环三个控制环 }
Motor Control 主要关注的是,控制单个电机的转距(torque control mode)、速度(speed control mode)、位置(position control mode)中的一个或多个参数达到给定值。
2. 运动控制
{ 运动部件参数:路径、轨迹、}
运动控制:主要是指以机械运动的驱动设备----电动机为控制对象,以单片机、CPU等控制器为核心,以电力电子功率变换装置为执行机构,组成的电器传动自动控制系统。自动控制系统将电能转化成机械能,实现机械部件的运动控制。
Motion Control 是对机械运动部件的位置,力矩,速度,加速度等进行实时的控制,使各个运动部件协同的按照预期的 运动轨迹 (路径规划、轨迹规划) 和 规定的运动参数 (速度/时间) 进行运动的一种控制,以达到高精度,低延时的自动控制的目的。包括:路径规划、前瞻控制、运动协调、插补、运动学正逆解。
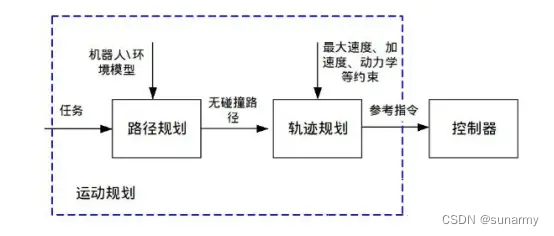
运动规划(motion planning)可以分为路径规划(path planning)和轨迹规划 (trajectory planning)两部分,路径表示在关节空间或操作空间中,机械臂在执行指定运动时必须跟随的点和轨迹。轨迹则是一条指定了时间律的路径。
运动规划、轨迹规划、路径规划的关系,如下图:
2.1 电机控制与运动控制的关系
从关注点来说,电机控制(这儿指伺服电机)首要关注的是控制单个电机的转距、速度、方位中的一个或多个参数到达给定值。而运动控制首要关注点在于和谐多个电机,完结指定的运动(组成轨道、组成速度),比较着重轨道规划、速度规划、运动学转化;比方数控机床里面要和谐XYZ轴电机,完结插补动作。
电机控制,常常作为运动控制系统的一个环节(一般是电流环,作业在力矩方式下),更着重于对电机的控制,一般包括方位控制、速度控制、转矩控制三个控制环,一般没有规划的才能(有部分驱动器有简单的方位和速度规划才能)。
运动控制,往往是针对产品而言的,包括机械、软件、电气等模块,例如机器人、无人机、运动渠道等等,是对机械运动部件的方位、速度等进行实时的控制管理,使其依照预期的运动轨道和规则的运动参数进行运动的一种控制。
两者有部分内容是重合的:方位环/速度环/转距环能够在电机的驱动器中完成,也能够在运动控制器中完成,因而两个属于简单混淆。
3. 过程控制
{ 工艺参数:温度、压力、流量、高度、液位、发光等参数进行测量和调控 }
ProcessControl 过程控制:过程控制是指对工业生产过程中的物理或化学过程进行监测和控制。 它涉及到对温度、压力、流量、液位、浓度等参数进行测量和调节,以确保生产过程中的稳定性、安全性和效率。 过程控制主要关注的是对连续性过程进行控制,例如化工厂的生产过程、电力厂的发电过程等。 常用的控制方式包括PID控制和模型预测控制。