1、算法描述
D*算法路径规划
D*算法(Dynamic A*)是A*算法的一种变种,主要用于在地图中的障碍物信息发生变化时重新计算路径,而不需要从头开始。该算法适用于那些只有部分信息已知的环境中。
工作原理:
1. D*算法首先像A*算法一样从目标点开始,反向向起点计算一个路径。
2. 当机器人在沿着此路径行进时遇到一个未知障碍物,D*算法会在遇到障碍物的位置修改地图的信息,并重新计算一条到目标的新路径。
3. D*算法只会更新被障碍物影响的部分路径,而不是重新计算整个路径,这使得D*算法在动态环境中更加高效。
优点:
1. 动态调整:当机器人在移动过程中遇到未知障碍物时,D*算法可以动态调整路径。
2. 效率:与每次都重新计算整个路径的算法相比,D*算法只需更新受障碍物影响的部分路径,因此更加高效。
3. 节省时间:由于不需要每次都从头开始计算,所以可以大大节省计算时间。
缺点:
1. 复杂性:相比于A*等静态路径规划算法,D*算法的实现更加复杂。
2. 不是实时的:虽然D*算法可以快速地更新路径,但在高度动态的环境中,它可能仍然无法满足实时性要求。
3. 可能不是最优的:在某些情况下,D*算法可能不能找到最优路径。
总结:
D*算法是一种在动态环境中寻找路径的方法,它可以有效地处理动态障碍物和变化的环境。但由于其复杂性,它的实现和维护可能相对困难。
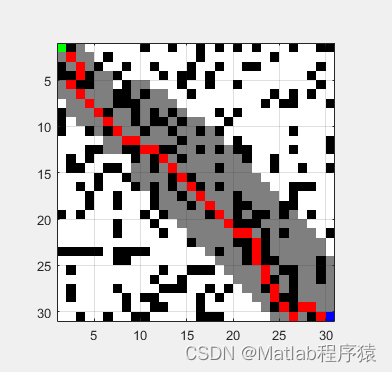
2、仿真结果演示
3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片