【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
之前的一篇文章,我们知道了可以通过wpr_simulation包仿真出机器人和现场环境。如果需要控制机器人,这个时候就需要rqt_robot_steering这个包来实现。可是大家有没有想过,为什么用rqt_robot_steering就可以实现对车的控制,如果是我们自己用c++编程,是不是也可以实现相同的控制呢?
1、rqt_bot_steering控制的原因
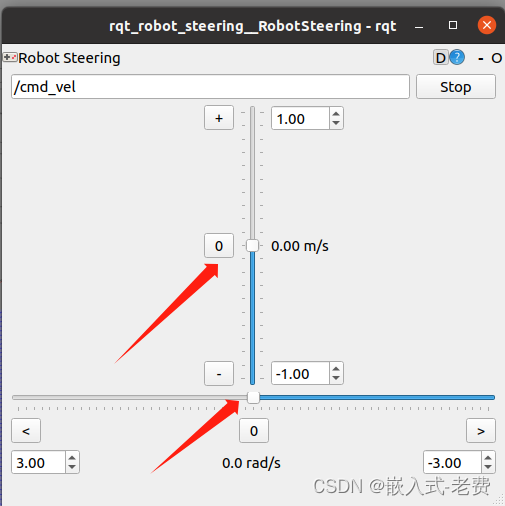
不知道大家对这样的一幅图,究竟还有没有印象。rqt_robot_steering能对小车进行控制,本质原因还是因为它给/cmd_vel发送了消息。简而言之,如果我们能编写对应的消息,那么其实也可以实现对小车的控制。
2、编写vel_node.cpp文件
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>int main(int argc, char* argv[])
{ros::init(argc, argv, "vel_node");ros::NodeHandle n;ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel", 10);geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0.1;vel_msg.linear.y = 0;vel_msg.linear.z = 0;vel_msg.angular.x = 0;vel_msg.angular.y = 0;vel_msg.angular.z = 0;ros::Rate r(30);while(ros::ok()){vel_pub.publish(vel_msg);r.sleep();}return 0;
}
代码的编写部分主要集中在vel_msg的发布。这里面有两个知识点,一个是/cmd_vel的发布;一个是vel_msg的填写。其中linear下面的x、y、z指的是三个方向的线速度,而angular下面的x、y、z则指的是围绕三个轴的角速度。线速度的单位一般是m/s,而角速度一般单位是弧度/s。
3、更新CMakelists.txt文件
add_executable(vel_node src/vel_node.cpp)
target_link_libraries(vel_node ${catkin_LIBRARIES})
add_dependencies(vel_node beginner_tutorials_generate_messages_cpp)
4、准备编译
编译的方法其实很简单,和之前ros的编译方法是一样的。即在catkin_ws输入catkin_make即可。如果没有问题,就可以生成vel_node程序。
5、验证vel_node是否ok
要验证vel_node程序是否真的发挥了作用,主要流程就是两个步骤。第一,用roslaunch启动wpr_simulation,
roslaunch wpr_simulation wpb_simple.launch第二,用rosrun启动vel_node,回头看gazebo里面的小车,如果小车式向前进行了移动,那么说明我们编写的vel_node程序是成功的。反之,如果没有看到这样的现象,那么就要回头看下,究竟我们在编写代码的过程中引入了什么错误。
rosrun beginner_tutorials vel_node