💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
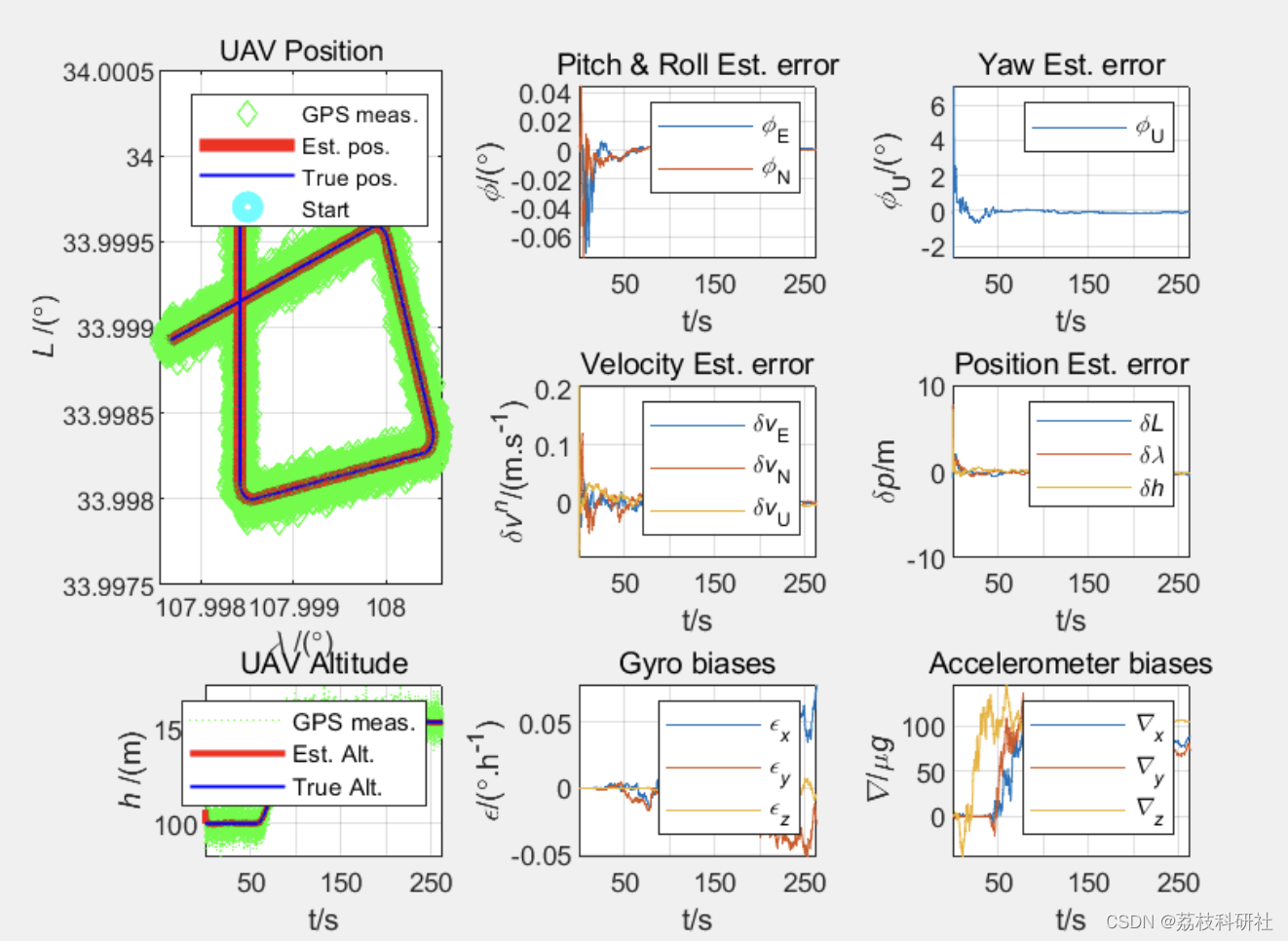
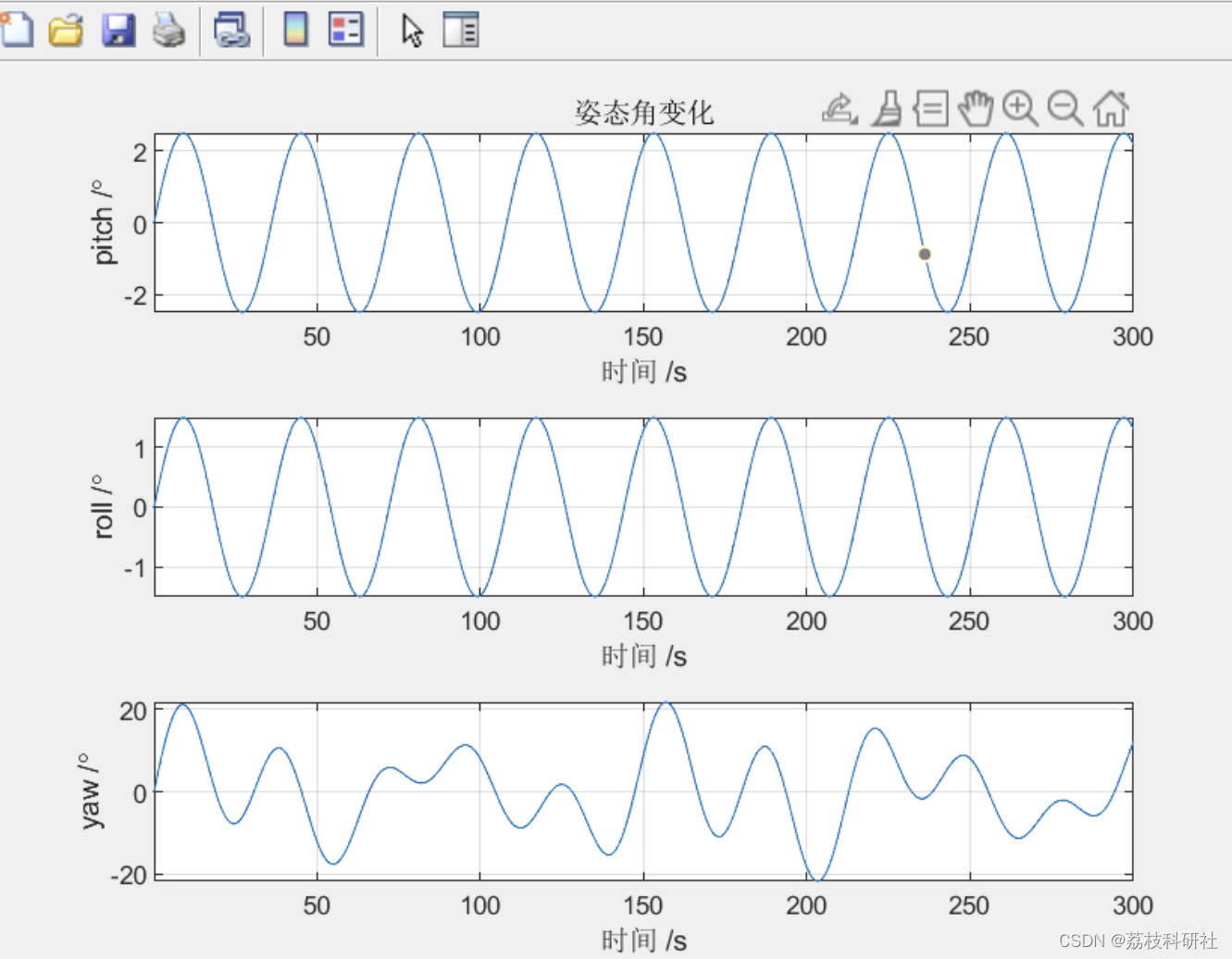
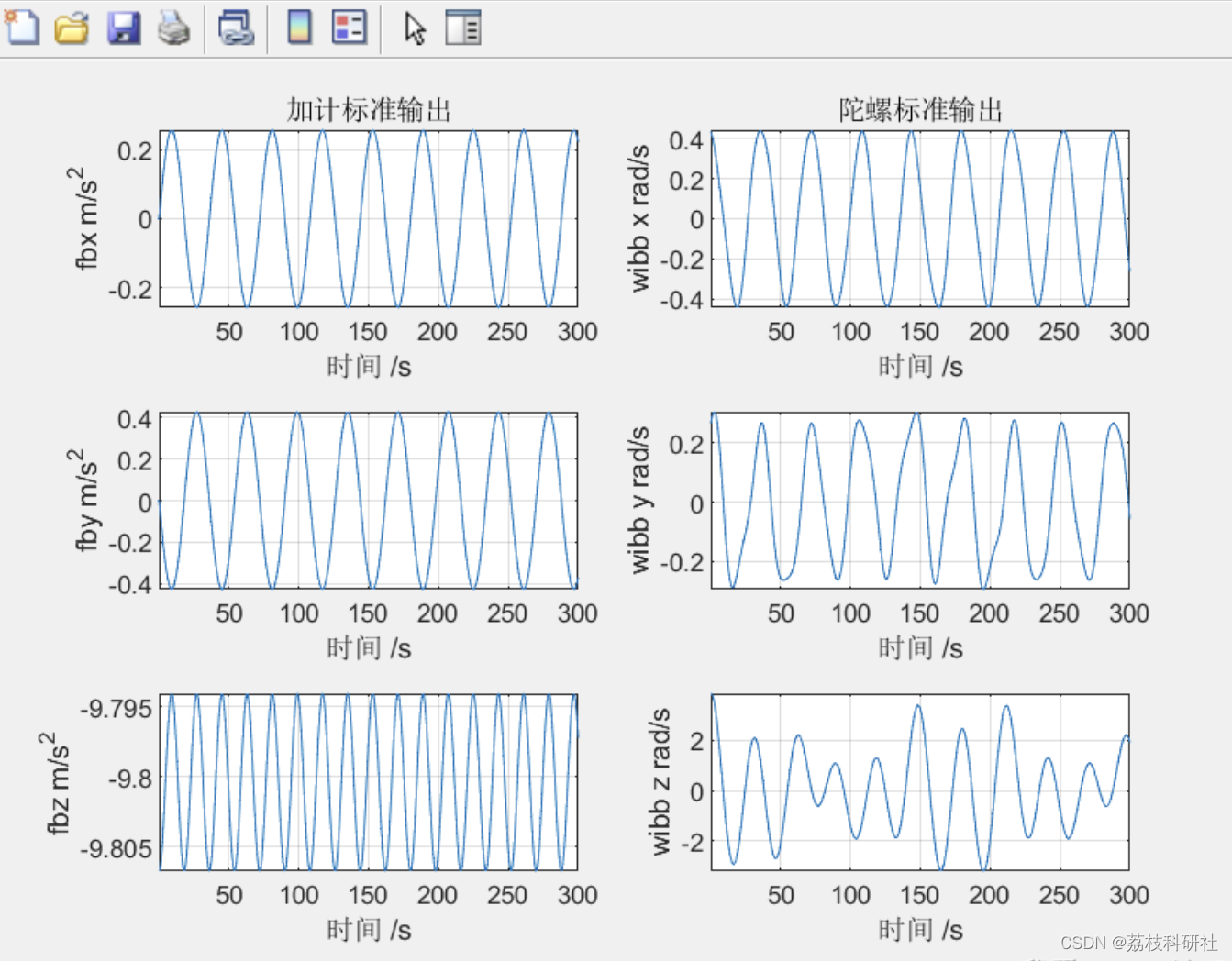
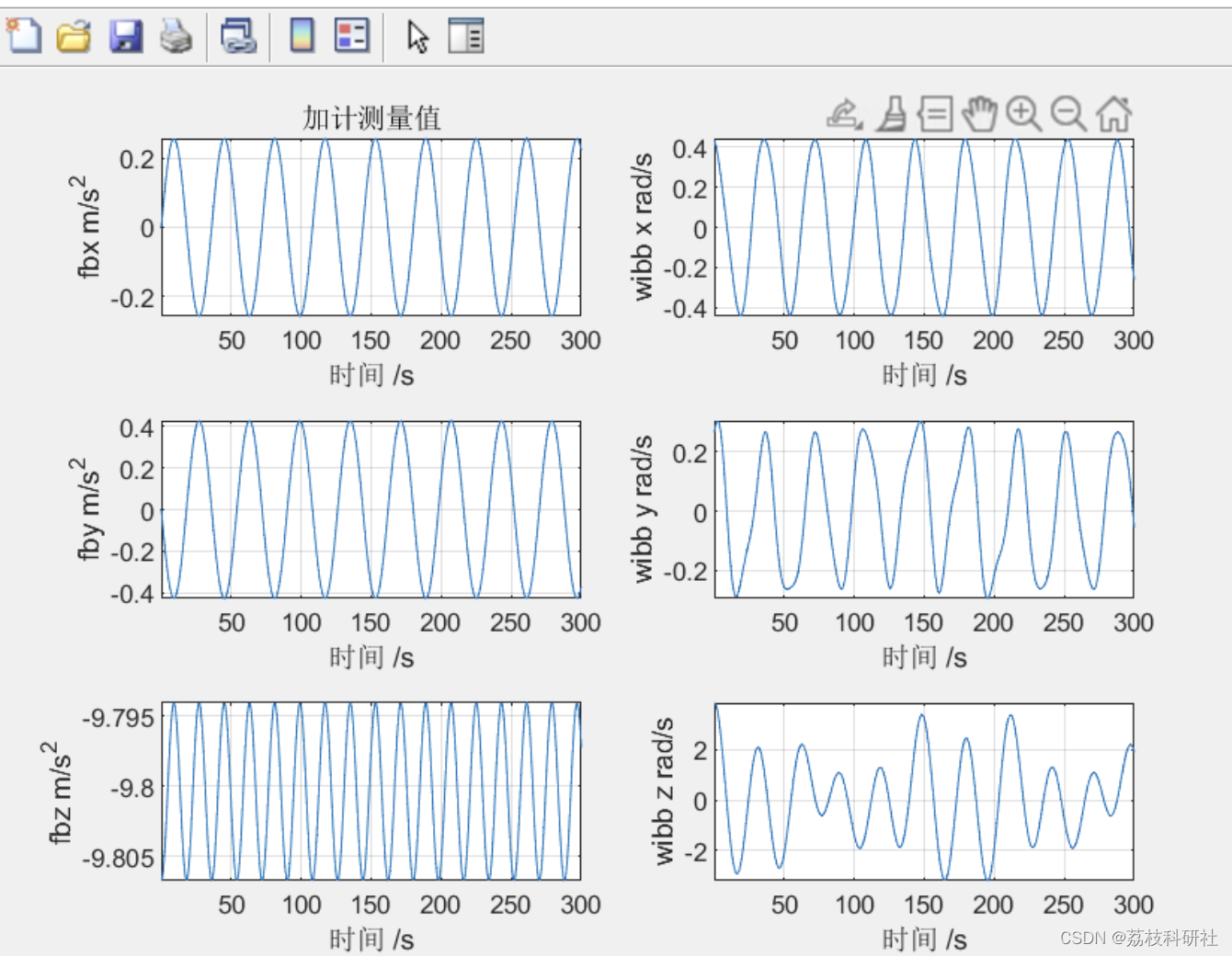
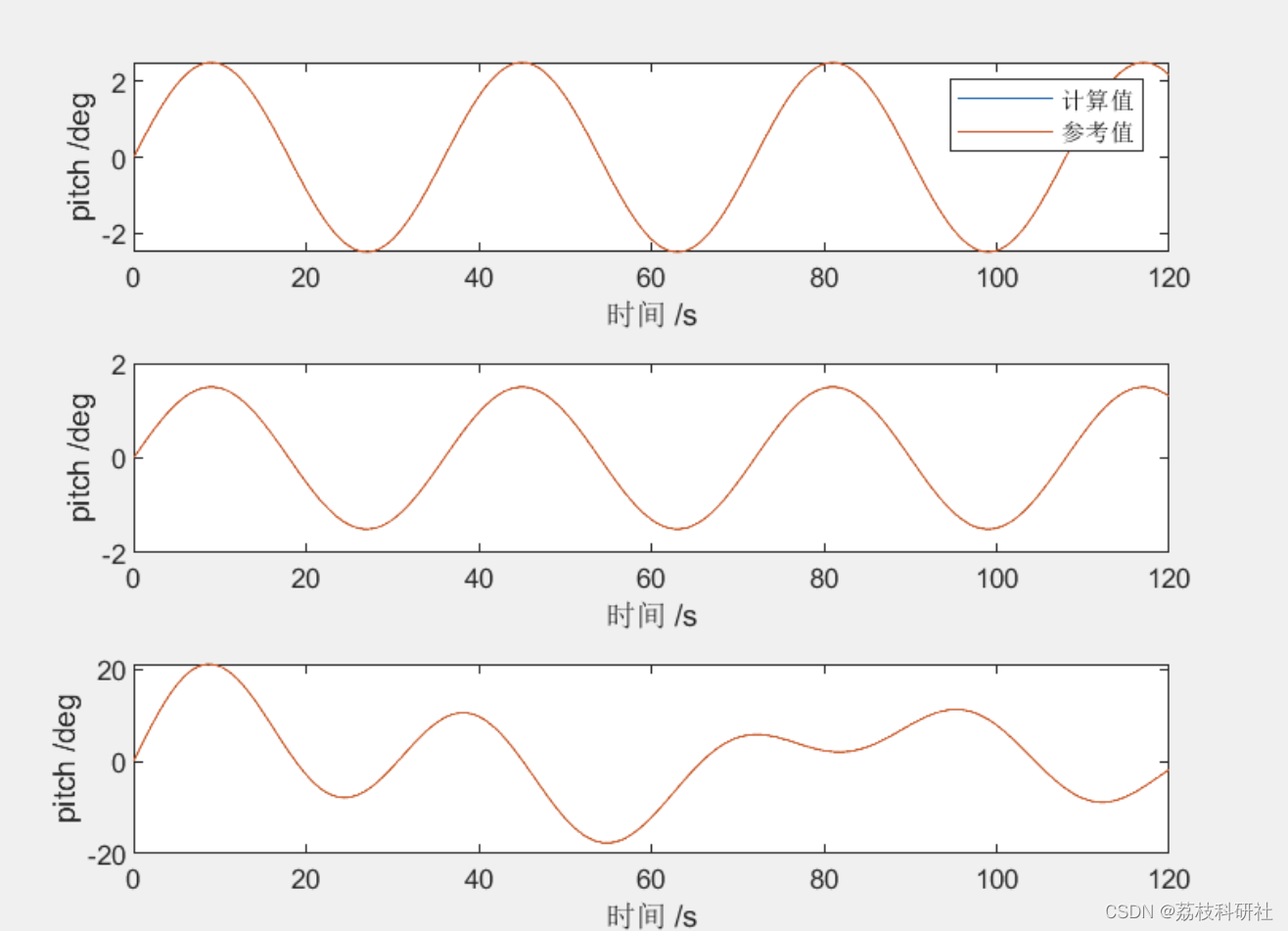
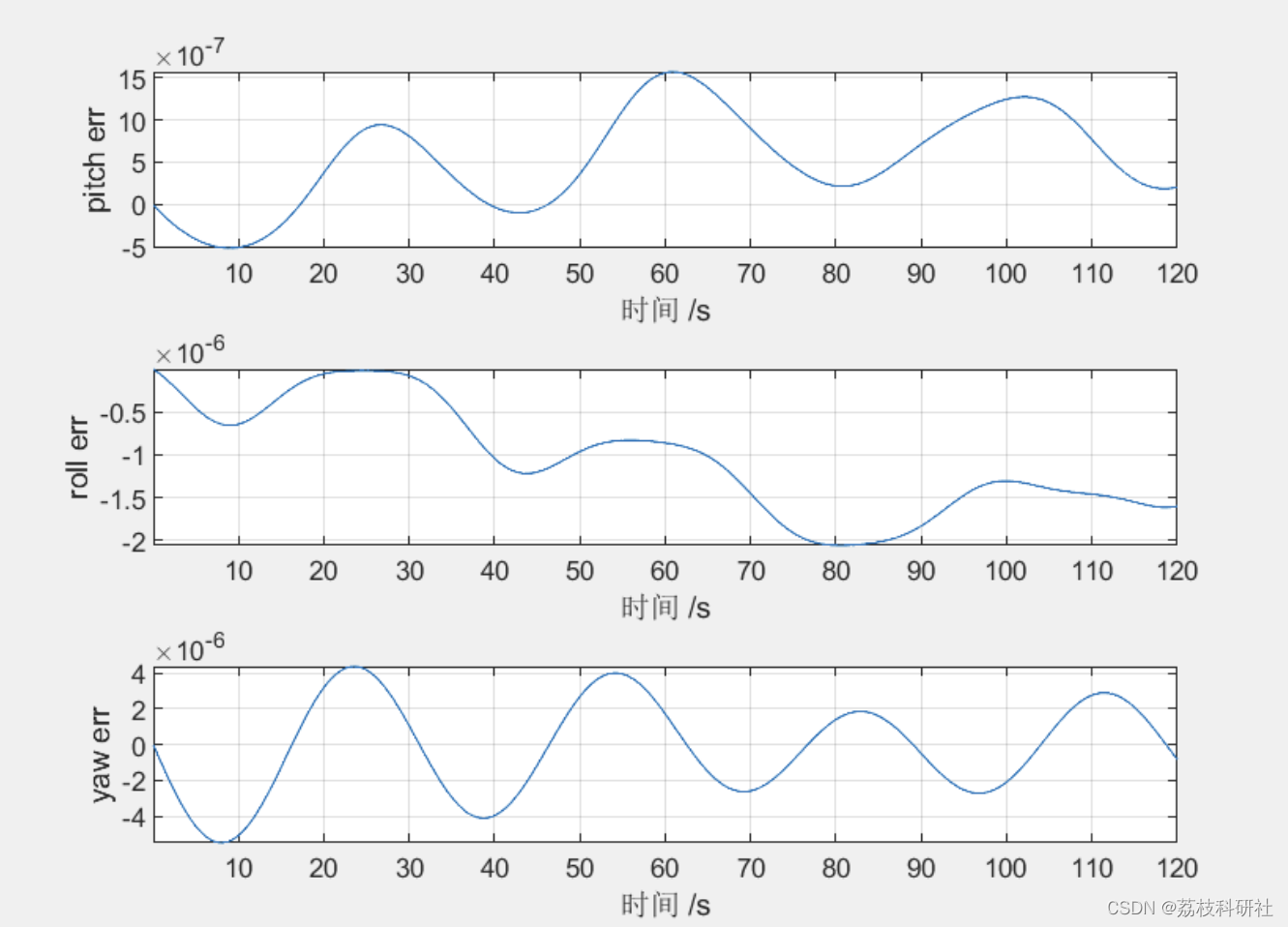
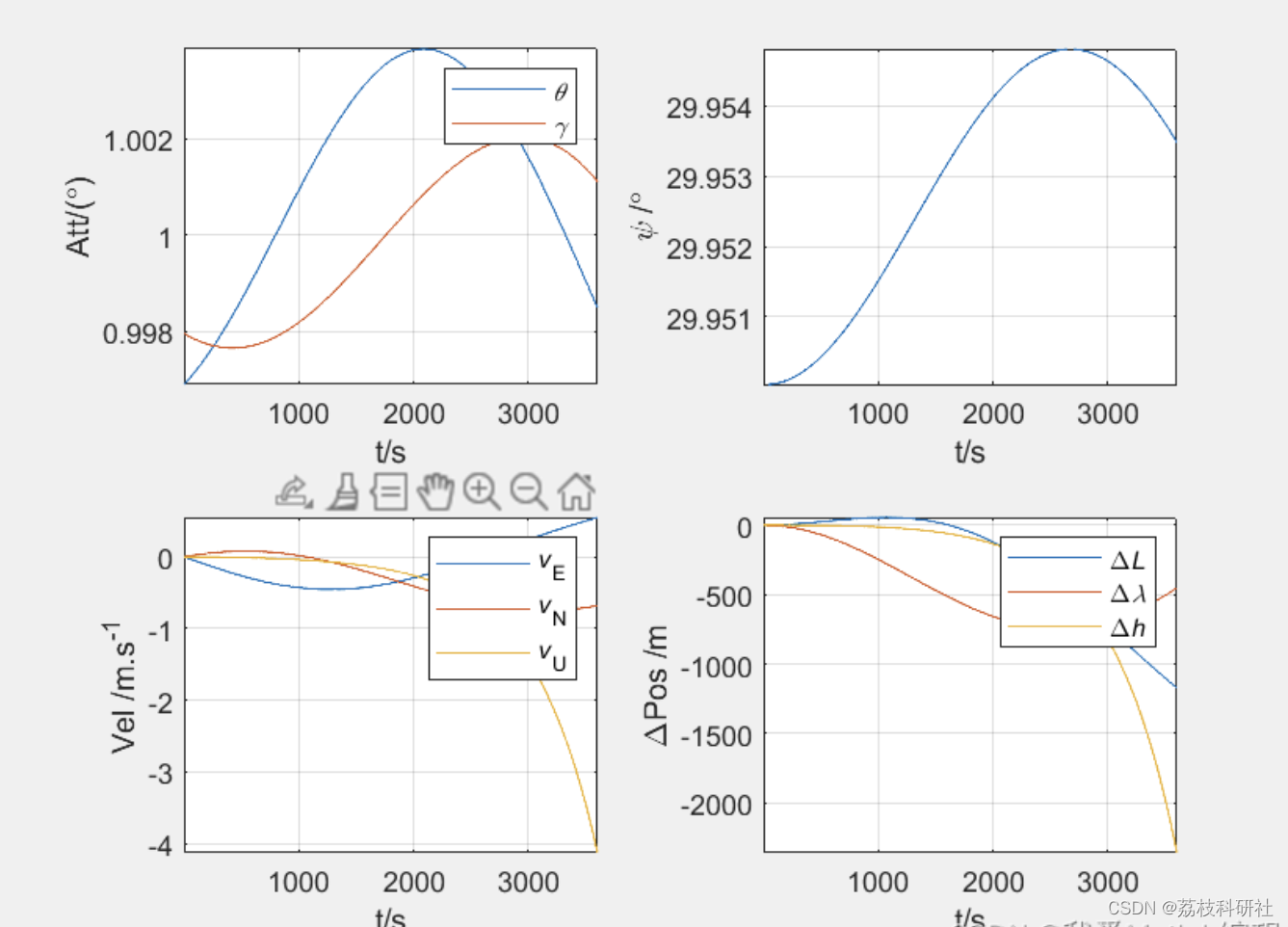
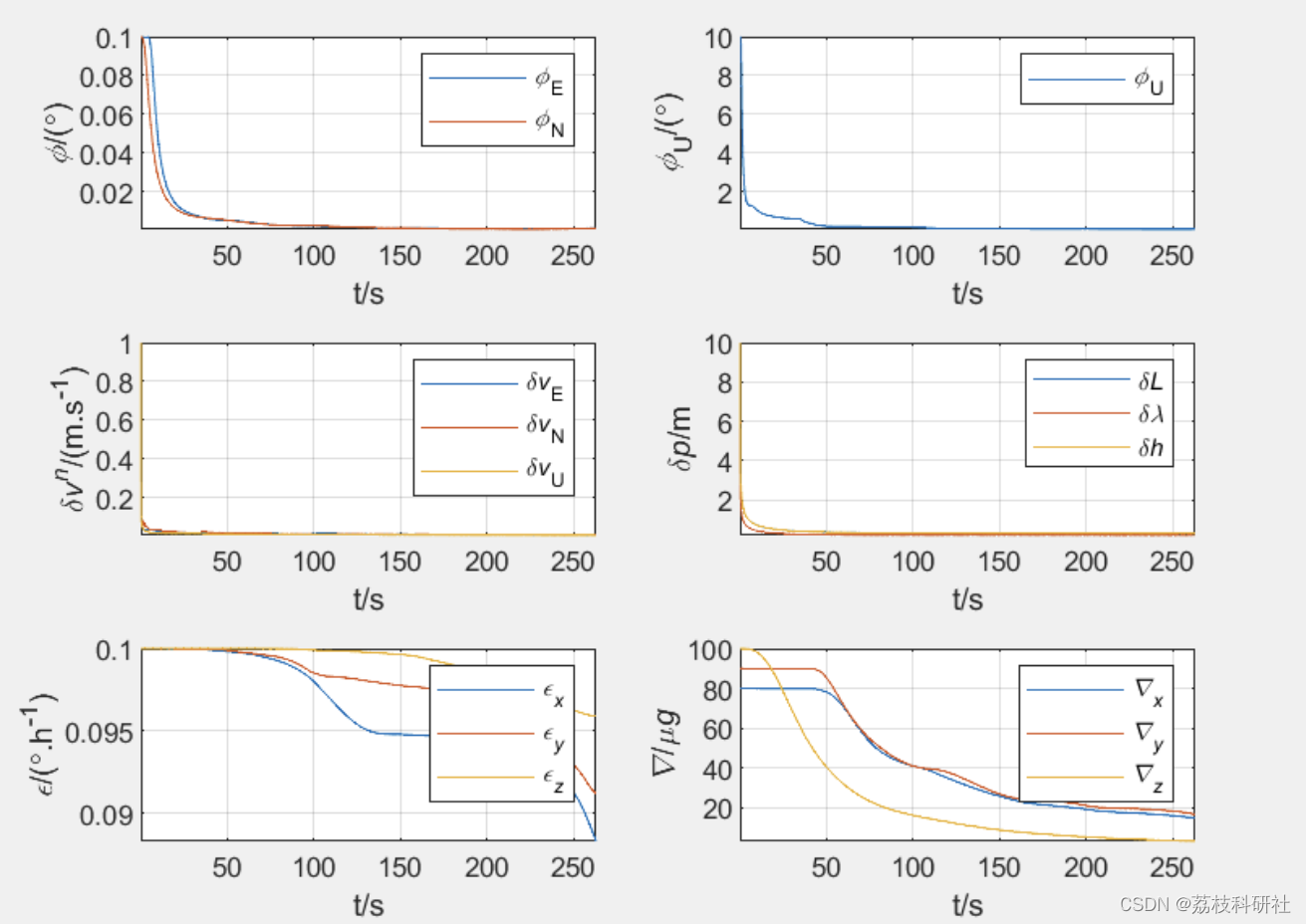
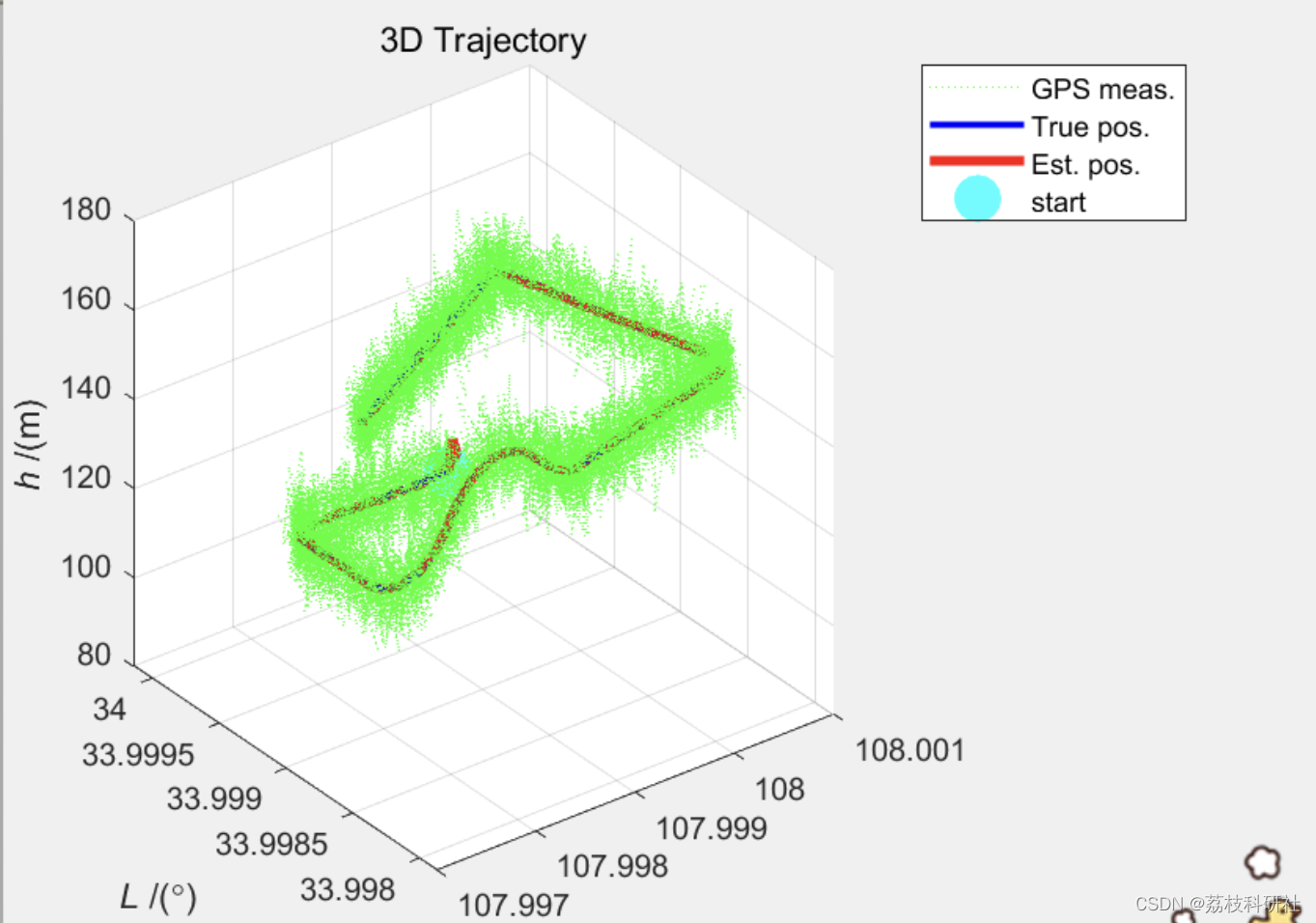
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
多旋翼无人机已被广泛应用于军事与民用领域。导航系统是多旋翼无人机的重要组成部分,是其实现安全与稳定飞行的基础。采用INS/GPS组合导航系统可实现高精度导航,该组合导航系统具有优势互补、导航机构冗余的特点,其实质是一个多传感器导航信息优化处理系统。无人机的主要导航参数就是依靠多传感器信息融合获得的,因此信息融合技术是组合导航系统的关键技术,目前已成为国内外学者研究的热点问题。随着多旋翼无人机向自主化和智能化发展,多旋翼无人机对其自身导航系统的性能提出了更高的要求。但是受多旋翼无人机自身成本的制约,导航系统中选用的传感器精度较低。针对这一矛盾,本文提出将无人机自带的微型惯导系统与GPS通过信息融合技术相结合,构成INS/GPS组合导航系统,由此能够提升导航系统的整体性能。本文的研究工作围绕组合导航系统的设计展开。除此之外,本文以课题组自行研制的全新结构多旋翼小型无人机为研究平台,展开对机载多传感器组合导航系统信息融合这一关键技术的研究。
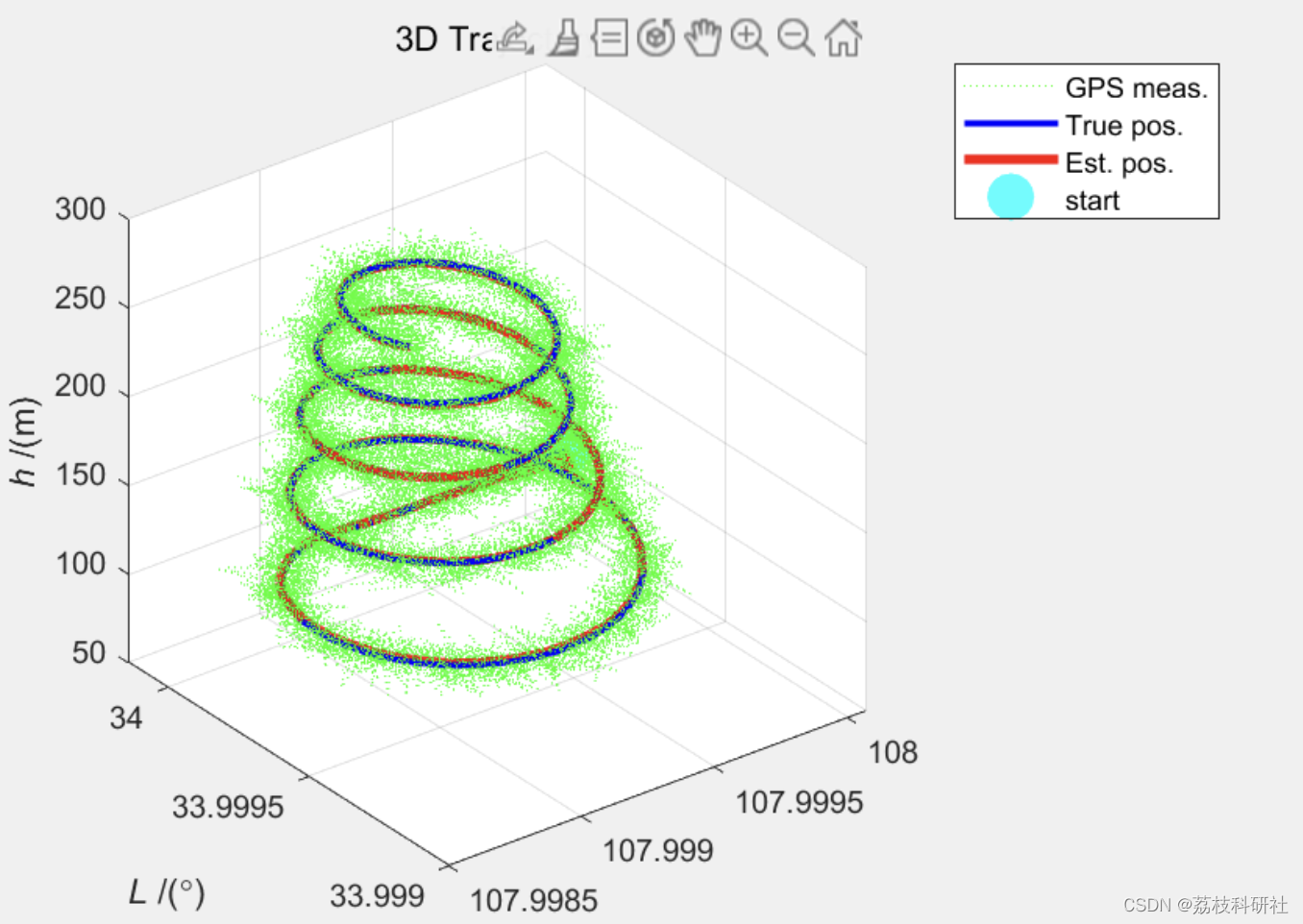
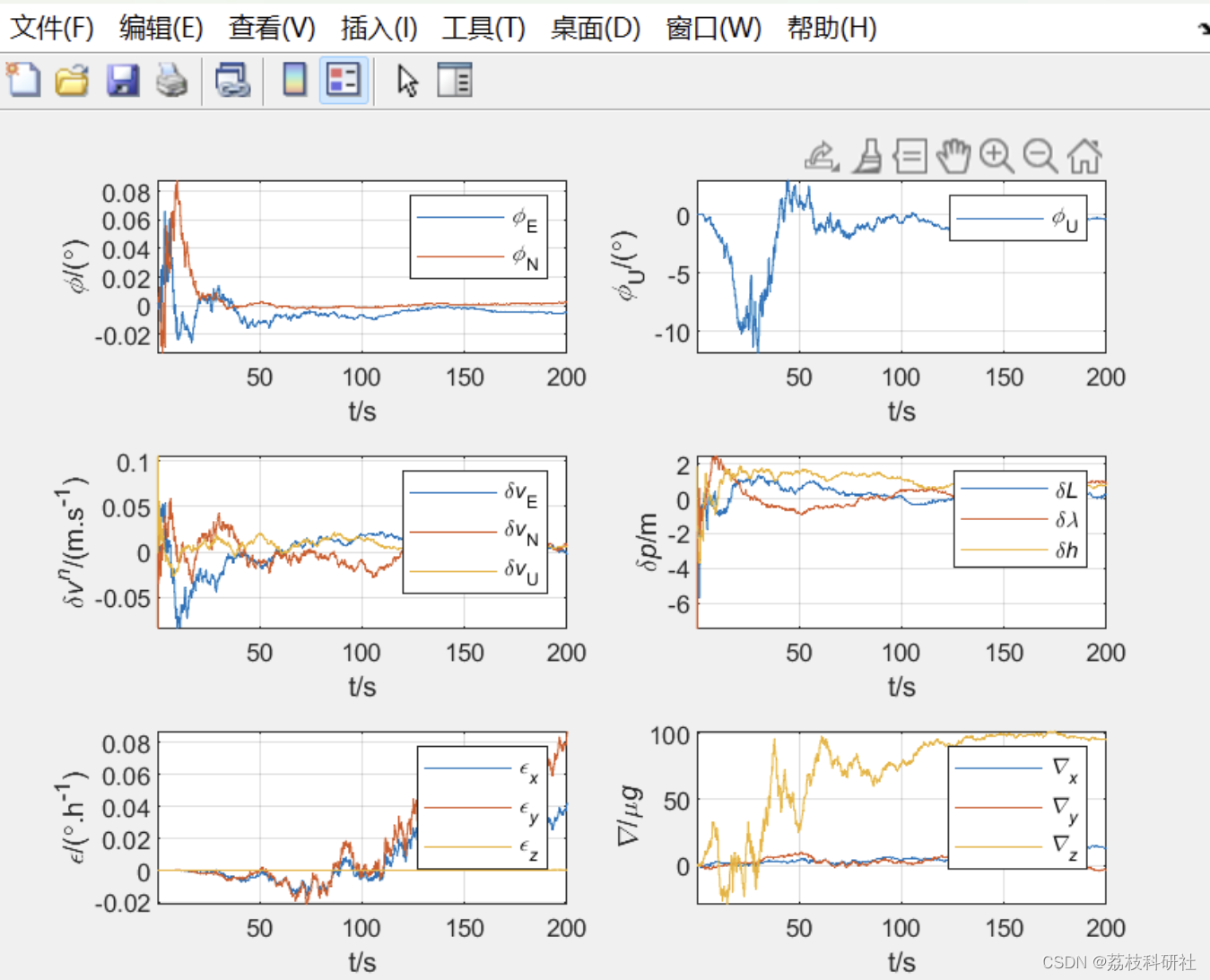
📚2 运行结果

部分代码:
% load Uav true trajectory data.
addpath UavTrajectorySim;
disp(' ')
disp('Available UAV Truth Trajectory Data Files:')
dir_mat_files = dir('UavTrajectorySim\*.mat');
for nFile=1:length(dir_mat_files)
fprintf(' %d: %s\n',nFile,dir_mat_files(nFile).name);
end
% nFileChoice = input('Choose a UAV Truth data file (e.g. 1<Enter>): ');
try
% load(dir_mat_files(nFileChoice).name)
load(dir_mat_files(1).name)
catch
error('Selected UAV Truth Trajectory data file (%d) is invalid.\n',nFileChoice);
end
gvar_earth;
% 单次更新中使用的子样数
nn = 2;
% 采样时间
ts = 0.01;
nts = nn*ts;
% 初始姿态、速度、位置
att0 = [0, 0, 90]'*arcdeg;
vn0 = [0, 0, 0]';
pos0 = [34*arcdeg, 108*arcdeg, 100]'; % lattitude, longtitude, height
qbn0 = a2qua(att0);
% 姿态四元数、速度、位置
qbn = qbn0;
vn = vn0;
pos = pos0;
eth = earth(pos, vn);
% *** 添加误差 ***
% 失准角
phi = [0.1, 0.2, 1]'*arcmin;
qbn = qaddphi(qbn, phi);
% 陀螺零偏,角度随机游走
eb_ref = [0.1, 0.15, 0.2]'*dph;
eb = [0.01, 0.015, 0.02]'*dph;
web = [0.001, 0.001, 0.001]'*dpsh;
% 加计零偏,速度随机游走
db_ref = [800, 900, 1000]'*ug;
db = [80, 90, 100]'*ug;
wdb = [1, 1, 1]'*ugpsHz;
Qk = diag([web', wdb', zeros(1, 9)]')^2*nts;
rk = [[0.1, 0.1, 0.1], [5/Re, 5/Re, 5]]';
Rk = diag(rk)^2;
% 协方差矩阵,x = [phi, delta_vn, delta_p, eb, db]
P0 = diag([[0.1, 0.1, 10]*arcdeg, [1, 1, 1], [10/Re, 10/Re, 10]...
[0.1, 0.1, 0.1]*dph, [80, 90, 100]*ug]')^2;
% 量测矩阵
Hk = [zeros(6,3), eye(6), zeros(6, 6)];
% Kalman filter initialization
kf = kfinit(Qk, Rk, P0, zeros(15), Hk);
% 与模拟轨迹时长一致
kTime = fix(t_SD/ts);
err = zeros(kTime, 10);
xkpk = zeros(kTime, 2*kf.n + 1);
pos_ref = zeros(kTime,3);
pos_est = zeros(kTime,3);
pos_gps = zeros(kTime,3);
kk = 1;
t = 0;
for k = 2 : nn : kTime
t = t + nts;
% 获取模拟轨迹对应的imu输出: 角增量和速度增量(参考值)
wm(1:nn,:) = imu_SD.wm(k-nn+1:k,:);
vm(1:nn,:) = imu_SD.vm(k-nn+1:k,:);
% 为IMU参考输出添加噪声
[wm1, vm1] = imuadderr(wm, vm, eb, web, db, wdb, ts);
% 惯导更新:姿态四元数、速度、位置
[qbn, vn, pos, eth] = insupdate(qbn, vn, pos, wm1, vm1, ts);
% 基于模型预测:导航误差系统模型卡尔曼滤波
kf.Phikk_1 = eye(15) + kfft15(eth, q2mat(qbn), sum(vm1, 1)'/nts)*nts;
kf = kfupdate(kf);
% 模拟GPS量测数据
gps = [avp_SD.vn(k,:)'; avp_SD.pos(k,:)'] + rk.*randn(6, 1);
pos_gps(kk,:) = gps(4:6)';
% 量测更新 5Hz
if mod(t, 0.2) < nts
Zk = [vn', pos']' - gps;
kf = kfupdate(kf, Zk, 'M');
end
% Indirect Kalman filter:feedback to IMU (反馈校正法)
qbn = qdelphi(qbn, kf.Xk(1:3));
vn = vn - kf.Xk(4:6);
pos = pos - kf.Xk(7:9);
pos_est(kk,:) = pos';
% 反馈校正:由于反馈项的存在导致卡尔曼滤波的先验估计值始终为零. Ref: 王辰熙
kf.Xk(1:3) = 0;
kf.Xk(4:6) = 0;
kf.Xk(7:9) = 0;
% kf.Xk(10:12) = 0;
% kf.Xk(13:15) = 0;
% compute the error between estimation & truth data
% Note that this 'error' is not the 'state vector' in the Kalman equ.
% In indirect kalman filter, the 'state vector' means the error of
% the IMU update (respect to True data.)
qbn_ref = a2qua(avp_SD.att(k,:));
vn_ref = avp_SD.vn(k,:)';
pos_ref(kk,:) = avp_SD.pos(k,:);
err(kk, :) = [qq2phi(qbn, qbn_ref)', (vn - vn_ref)', (pos - pos_ref(kk,:)')', t];
xkpk(kk, :) = [kf.Xk', diag(kf.Pk)', t]';
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]刘洪剑,王耀南,谭建豪,李树帅,钟杭.一种旋翼无人机组合导航系统设计及应用[J].传感技术学报,2017,30(02):331-336.