举例计算
要对一个100mm见方的黑白物体进行拍摄, 要求能够分辨小于0.1mm的细节, 相机到物体的距离在200~400mm之间, 要求选择合适的相机和镜头。
分析:
- 景物为一100mm的方形物体, 而传感器靶面通常为4:3的矩形, 因此, 为了将物体全部摄入靶面, 应该以靶面的短边长度为参考来计算视场;
- 系统要求能够分辨小于0.1mm的细节,因此传感器每个方向的像素数都要大于 1000;
- 相机到物体的距离为200–400mm, 考虑到镜头本身的尺寸, 可以假定物体到镜头的距离为 200~320mm, 系统的物距为 260 mm;
- 物体为黑白色, 因此系统的工作波长可定为可见光区域, 相机选择黑白相机。
常用计算公式:
相机、镜头常用参数确定方式:
-
通过被侧物体的大小和分辨率来计算像素:100 / 0.1mm = 1000 (像素),选择大于等于1K像素的相机。 -
验证分辨率是否达到要求:100 / 1024 = 0.0976 < 0.1 (实际分辨率小于要求分辨率),满足要求。 -
根据被测物体的速度求相机的拍摄频率: 速度 / 相机实际分辨率 = 相机需要的拍摄频率。 -
可以根据分辨率、相机的行频、来初步确定相机型号。 -
相机靶面尺寸 = 像素 * 像元尺寸来计算 。 -
镜头焦距 = 靶面尺寸 * 物距 / 幅宽 -
镜头像元分辨路 = 1 /(2 * 像元尺寸) 选择镜头时通常要求镜头分辨率要略高于像元分辨率
方案一:
下面确定相机型号:
相机选择大恒CCD黑白相机DH-SV1411FM,
靶面尺寸为2/3英寸 (8.8X6.6mm),
像素数为1392X1040,
像元尺寸为6.45um 。
系统的放大倍率为 B = 靶面尺寸 / 视场大小 = 6.6/100=0.066,
可分辨的景物精度为: 像素尺寸 / 放大倍率 = 0.00645/0.066=0.098 mm, 满足系统要求。
镜头型号:
摄影物镜的焦距为f= 物距/(1+1/放大倍率) = 260/(1+1/0.066)=16.1mm,
系统像面的分辨率要大于 1/(2X0.1X0.066)=76(lp/mm),
因此摄影物镜可以选择Computar M1614-MP2。 镜头均采用可变光阑, 其光圈数从F1.4到 F16, 可调节系统的通光量。
方案二:
相 机 选 择 大 恒 CCD 黑 白 相 机 DH-SV1421FM,
靶面尺寸为1/2英寸(6.4X4.8 mm),
像素数为 1392X1040,
像元尺寸为4.65um 。系统的放大倍率为: B=4.8/100=0.048,
可分辨的景物精度为: 像素尺寸/放大倍率=0.00465/0.048=0.097mm, 满足系统要求。摄影物镜的焦距为f=l/(1+1/B)=260/(1+1/0.048)=11.9 mm,
系统像面的分辨率要大于 1/ (2X0.1X0.048)=104(lp/mm), 因此摄影物镜可以选择Kowa LM12JCM。
镜头均采用可变光阑,其光圈数从F1.4到F16, 可调节系统的通光量。
以上两个方案只对镜头的主要参数进行计算选择, 其它一些要求, 如畸变、 景深, 环境等等, 也可根据实际要求进行匹配
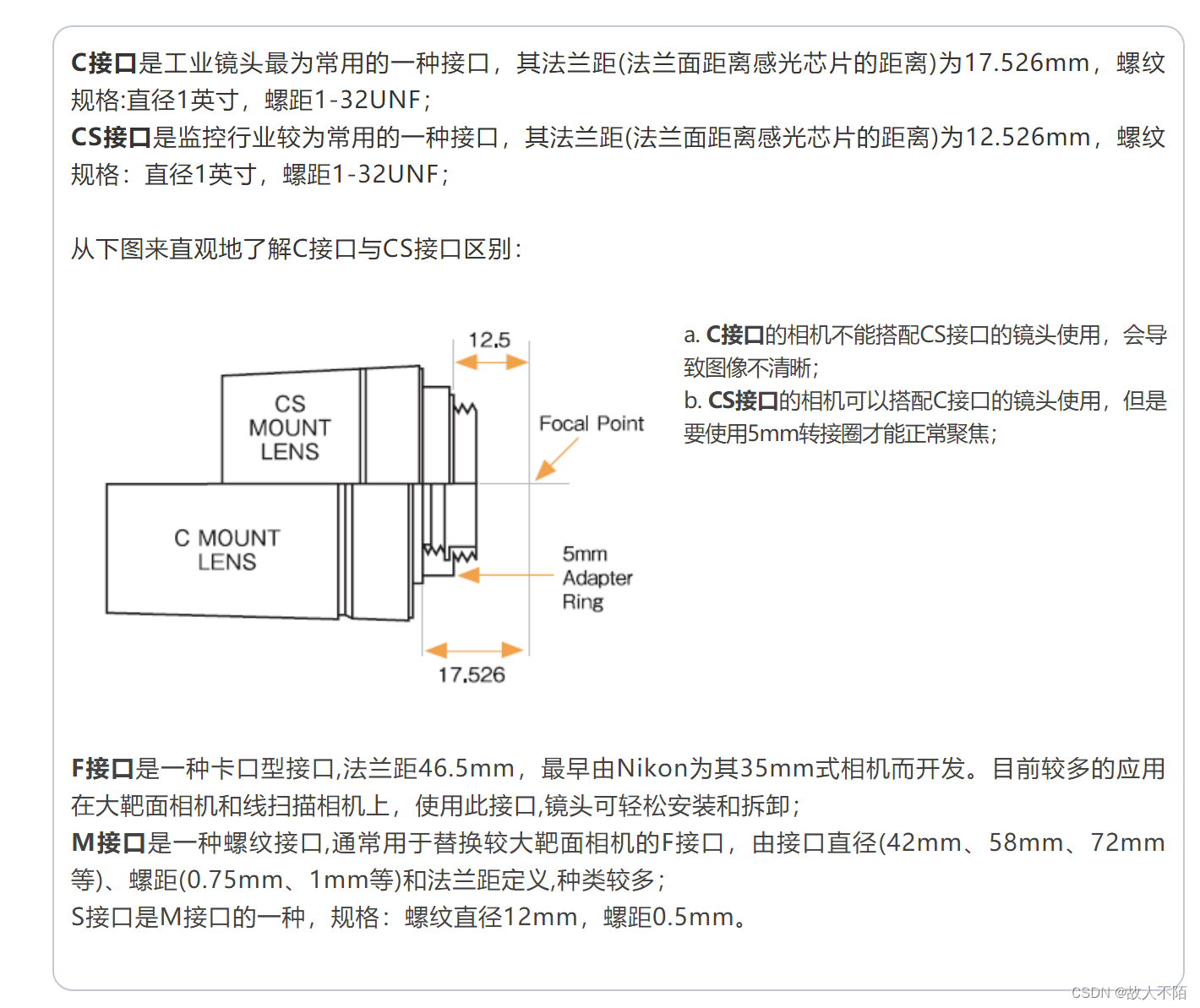
接口:
常用的一些接口类型如下表所示:

法兰后焦距、机械后焦距与光学后焦距的区别在于;法兰后焦距,是指机身上镜头卡口平面与机身曝光窗平面之间的距离,即镜头卡口到感光元件之间的距离如下图数值17.526mm;机械后焦距,指镜头桶上边沿到sensor感光面的距离如下图数值10.9mm;光学后焦距,指光线离开镜头最后一片镜片表面到sensor感光面的距离如下图数值14.9mm;一般光学后焦大于机械后焦距。

透镜示意图:



选型小总结:
-
C接口,C型接口螺纹连接,后截距为17.5mm;
-
F接口镜头是尼康镜头的接口标准,工业相机靶面大于1英寸时需用F口的镜头;
-
镜头的分辨率要高于像元的分辨率;
-
焦距越小,景深越大,畸变越大;焦距越小,渐晕军现象越严重,使像边缘的照度降低;
-
光圈越大,图像亮度越高;景深越小;分辨率越高;
-
像场中心比边缘分辨率高;像场中心比边缘光强亮;
-
光波长度的影响:光波长度的影响:在相同的工业相机及镜头参数条件下,照明光源的光波波 长越短,得到的图像的分辨力越高。所以在需要精密尺寸及位置测量的视觉系统中,尽量采用短波长的单色光作为照明光源,对提高系统精度有很大的作用;
-
标准C口: 靶面 11mm-22mm(2k以下);
-
F口: 靶面 28mm-50mm(4k以下);
-
V口镜头:靶面 28mm -108mm (8K以上) V口镜头:靶面 28mm -108mm (8K以上);
-
靶面 : 镜头的靶面要大于或等于sensor的对角线。