代码链接:https://github.com/PanJinquan/python-learning-notes/blob/master/modules/utils_3d/camera_tools.py
def __cam2pixel(cam_coord, f, c):"""相机坐标系 -> 像素坐标系: (f / dx) * (X / Z) = f * (X / Z) / dxcx,ppx=260.166; cy,ppy=205.197; fx=367.535; fy=367.535将从3D(X,Y,Z)映射到2D像素坐标P(u,v)计算公式为:u = X * fx / Z + cxv = Y * fy / Z + cyD(v,u) = Z / Alpha=====================================================camera_matrix = [[428.30114, 0., 316.41648],[ 0., 427.00564, 218.34591],[ 0., 0., 1.]])fx = camera_intrinsic[0, 0]fy = camera_intrinsic[1, 1]cx = camera_intrinsic[0, 2]cy = camera_intrinsic[1, 2]=====================================================:param cam_coord::param f: [fx,fy]:param c: [cx,cy]:return:"""# 等价于:(f / dx) * (X / Z) = f * (X / Z) / dx# 三角变换, / dx, + center_xu = cam_coord[..., 0] / cam_coord[..., 2] * f[0] + c[0]v = cam_coord[..., 1] / cam_coord[..., 2] * f[1] + c[1]d = cam_coord[..., 2]return u, v, d@staticmethoddef convert_cc_to_ic(joint_cam):"""相机坐标系 -> 像素坐标系:param joint_cam::return:"""# 相机坐标系 -> 像素坐标系,并 get relative depth# Subtract center depth# 选择 Pelvis骨盆 所在位置作为相机中心,后面用之求relative depthroot_idx = 0center_cam = joint_cam[root_idx] # (x,y,z) mmjoint_num = len(joint_cam)f = camera_intrinsic["f"]c = camera_intrinsic["c"]# joint image_dict,像素坐标系,Depth 为相对深度 mmjoint_img = np.zeros((joint_num, 3))joint_img[:, 0], joint_img[:, 1], joint_img[:, 2] = CameraTools.__cam2pixel(joint_cam, f, c) # x,yjoint_img[:, 2] = joint_img[:, 2] - center_cam[2] # zreturn joint_img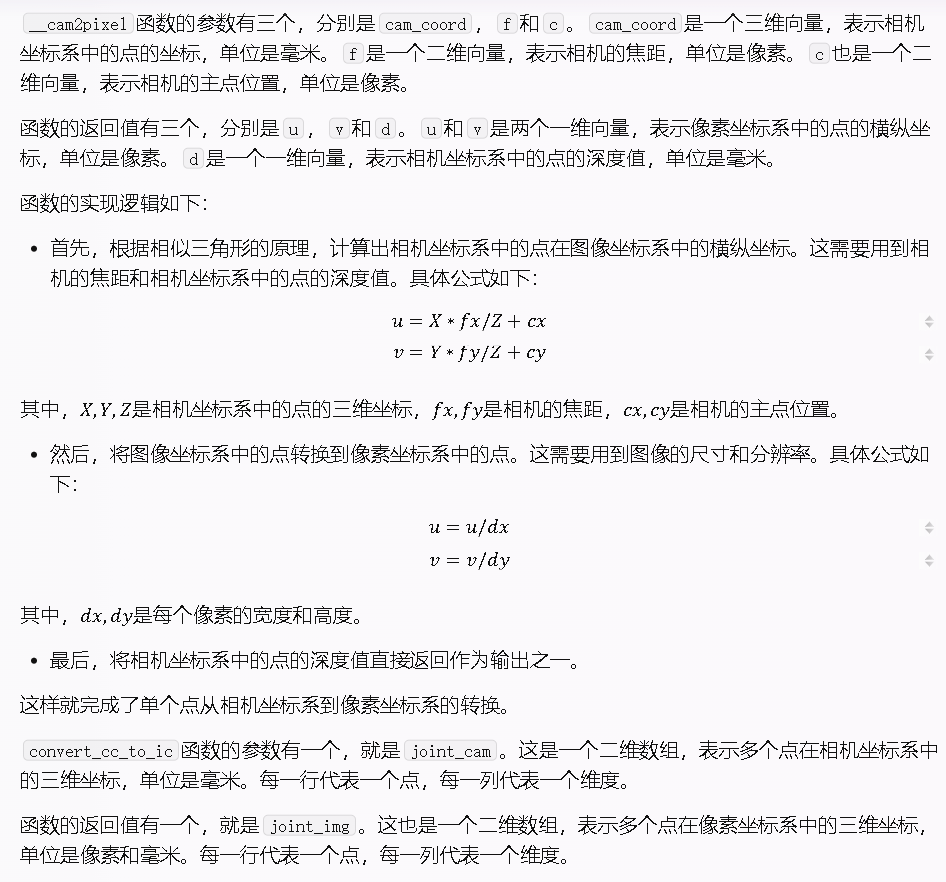
__cam2pixel函数并没有处理相机坐标系中cam_coord[…, 2]的值,直接返回当作深度值。这是因为这个函数只是用来将相机坐标系中的点转换到像素坐标系中的点的,不需要对深度值做任何变换。深度值的变换是在convert_cc_to_ic函数中进行的,这个函数会将所有点的深度值减去根节点(Pelvis骨盆)的深度值,得到相对深度值。这样做的目的是为了消除相机位置和姿态对深度值的影响,只保留点之间的相对距离。