Laikago 四足机器人的自主导航
开发智能机器人系统是一项多学科的工作,集成了动力学、控制、计算机视觉、人工智能等。 很难掌握所有这些领域。 即使你掌握了所有这些,也需要花费大量时间才能正确和稳健。
为了帮助机器人专家加速智能机器人的开发,NVIDIA Isaac SDK 包含参考应用程序和平台。 其中一个平台是 Kaya,一种三轮完整的自主机器人。 Laikago 应用程序是使用 Kaya 作为参考构建的,以创建可以导航和避开障碍物的自主机器。
Laikago 是由 Unitree Robotics 制造的四足机器人。 它具有用于在微控制器单元 (MCU) 中行走和平衡的运动控制算法。 它还提供一个作为可选包的安装座,其中包括用于大脑的 NVIDIA Jetson TX2 模块,允许用户开发自定义软件并访问运动控制和传感器数据。 开箱即用,它没有任何用于映射、定位或避障的传感器或软件。
此应用程序使用 Velodyne VLP-16 激光雷达进行感知,并将 Isaac SDK 导航堆栈与 Unitree Robotics API 集成。 所有计算都在 TX2 内部完成。 运动控制器以 500Hz 运行,而导航堆栈需要 50% 的 CPU。 运行此应用程序时,Laikago 以 0.6 m/s 的峰值速度行走。

升级硬件
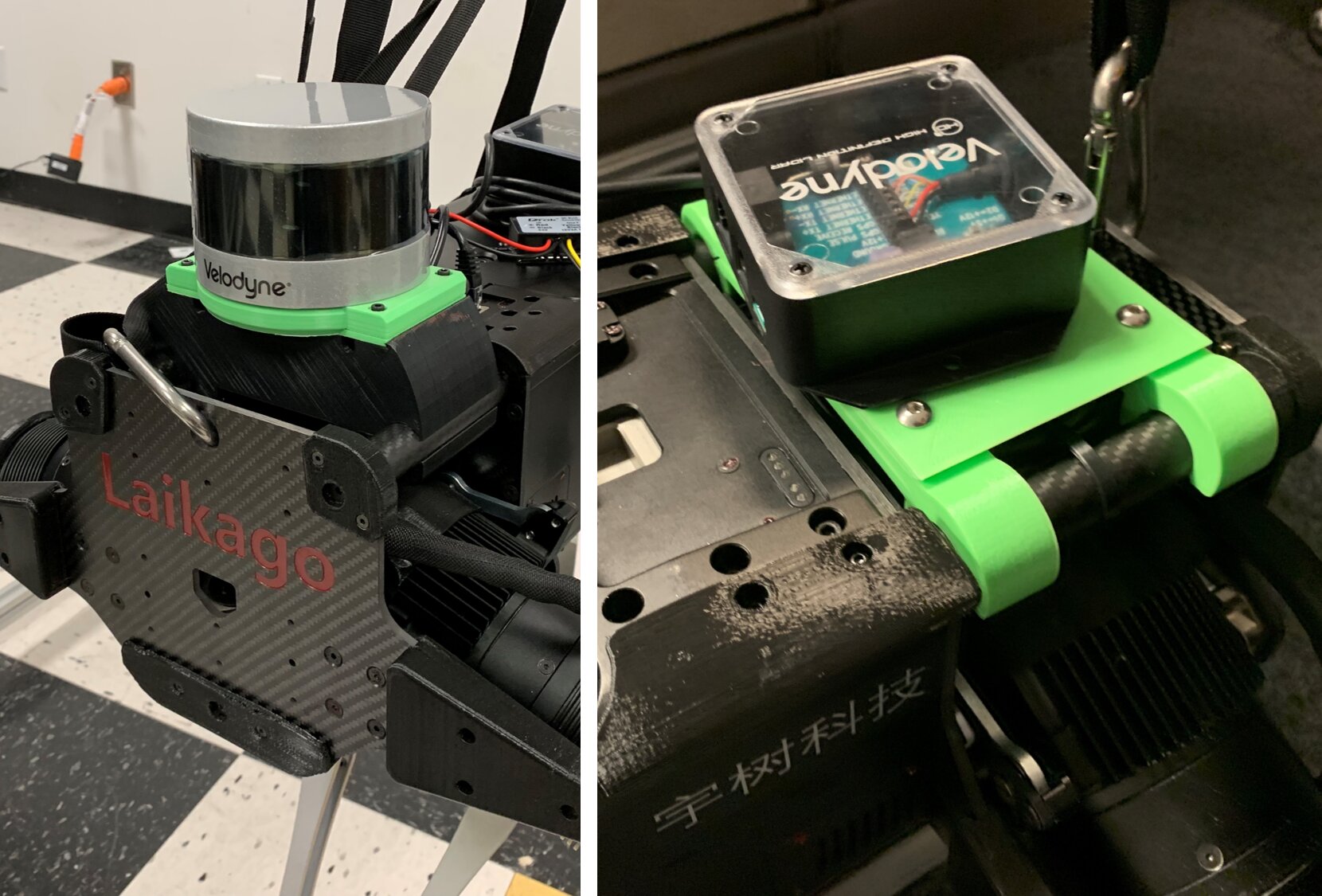
您需要将激光雷达和接口盒安装到 Laikago。 我们根据 Unitree GitHub 存储库中的 Laikago CAD 文件设计了 3D 打印支架。 Laikago 提供 19V 输出,高于 VLP-16 的工作电压。
注意
最新的 VLP-16 支持高达 32V 的规格。
我们建议使用 DC-DC 转换器来降低电压,并使用 USB 转以太网将激光雷达传感器连接到 TX2。 您还可以安装一个兼容的摄像头用于物体检测,但在这个示例应用程序中没有应用。 下图显示了整体设置。
Isaac SDK 导航和感知堆栈与 Jetson 板的传感器品牌和类型无关。 例如,Kaya 使用相同的导航堆栈,但在 Jetson Nano 上运行,并使用摄像头而不是激光雷达传感器进行定位。 Kaya 的许多感知算法也适用于简单的网络摄像头。
软件概述
此应用程序主要使用 Isaac SDK 导航堆栈,其中包括地图、定位、全局路径规划、控制、避障、里程计和路径跟踪。 Isaac SDK 还包括激光雷达驱动程序和 Laikago SDK,因此不需要额外的库或依赖项。
下图显示了设计层次结构。 所有圆框都包含在 Isaac SDK 中。 矩形框指定机器人硬件。 Laikago 驱动主要用于将 Isaac SDK 的消息传递给 Laikago SDK。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WtYh3q01-1673226211970)(https://docs.nvidia.com/isaac/_images/laikago_app_graph.png)]
运行 Laikago 导航应用程序
-
确保 Jetson 设备已按照设置文档中的详细信息进行设置。
-
构建一个 ARM 目标并使用以下命令将其部署到机器人:
bob@desktop:~/isaac/sdk$ ./../engine/engine/build/deploy.sh --remote_user <username> -p //packages/laikago/apps:laikago_navigate-pkg -d jetpack45 -h <robot_ip_address>其中
<username>是您在机器人上的用户名(默认为 nvidia),<robot_ip_address>是机器人的 IP 地址。 -
使用以下命令通过 SSH 连接到机器人:
bob@desktop:~/isaac/sdk$ ssh <username>@<robot_ip_address>其中
<username>是您在机器人上的用户名(默认为 nvidia),<robot_ip_address>是机器人的 IP 地址。 -
使用以下命令在机器人上运行 Laikago 应用程序:
bob@jetson:~/$ ./packages/laikago/apps/laikago_navigate --config <map_config_json> --graph <map_graph_json><map_config_json>和<map_graph_json>是地图文件。apps/assets/maps文件夹中提供了示例。连接到蓝牙操纵杆控制器。 我们在此示例中使用 NVIDIA Shield 控制器。 这可用于向 Laikago 发送定向命令并触发自主导航模式。
注意
默认情况下,机器人处于“站立”模式。 当方向命令通过一个小阈值时,机器人将开始行走。 有关详细信息,请参阅操纵杆部分。
-
在
<robot_ip>:3000的浏览器中打开 Isaac Sight。 您应该会看到 Laikago 所在的地图。 使用操纵杆移动 Laikago 并观察地图更新。