@(论文阅读)
作者自述:到了新的实验室,原本的实验方向发生了巨大的改变,对自动驾驶和车联网一头雾水,所以从综述入手,了解轨迹预测任务的头尾,以及对于现阶段的研究点做出初步的统计和积累,为后续工作的展开奠定坚实的基础,希望能够为车联网事业的发展狠狠地贡献一把力量。
A survey on Trajectory-Prediction Methods for Autonomous Driving
Authors : Yanjun Huang et al.
**Insititute: ** Tongji University, Automotive Studies school.
Abstract:
为了在动态变化的道路上安全驾驶,自动驾驶汽车(车联网汽车)需要预测未来的运行轨迹,并且需要判断周边车次、行人等道路交通参与者的运行轨迹。这也是为什么很多学者致力于轨迹预测研究,以及众多方法涌现出来的原因。这篇文章收集了近二十年的自动驾驶领域中的关于轨迹预测的可比较的和可解释性的工作回顾。以问题的公式化和算法分类开头,展开基于物理学、经典的机器学习方法、深度学习、强化学习方法的讨论,并且对现有方法做实验性介绍和分析,并对每种方法的强弱点做一个讨论,指明未来的研究方向!
Introduction
It belongs to me!!!
Autonomous driving is attracting more and more attention from both academia and industial sectors, because of its promising merits (potentials)to solve many long-term transportation challenges related to safety, congestion, energy-saving, and so on.
In recent years, we have witnessed the rapid development of perception, planning and control systems for autonomous vehicels(AVs).
However, mass production of AVs will become true only if the safety of autonomous driving is verified.
To further improve the safery, one of the most key technologies is AVs sholuld be able to predict the future states of the surrounding environment in real time like human drivers.
When a human drives a vehicle, he usually observes the surrounding traffic participants and predicts their future states before initiating a new driving maneuver, e.g., acceleration or lane change. (could alternate to the deceleration, turns).
Future states of traffic participants can be represented by future trajectories, utilized to detect potential dangers in advance and used in designing decision-making or planning algorithm, as hown in Fig.1.
However, due to diverse maneuvers of traffic participants, the complex interaction between traffic participants and environments,
the uncertainty of sensory information, the computation burdens and computing time requirements of AVs,
how to accurately predict future trajectories of traffic participants is drawing much attention and becoming one of the key points to improve the safety of autonomous driving.
here is too much / partially theroies or ideal, compare to reality, sometimes, human could hardly to determine the situation of the front car always.
Many researchers are devoted to the field of trajectory prediction and propose a number of useful methods.
Several review papers have discussed a part of trajectory-prediction techniques. list:
Lefevre et al. present a survey on existing methods of motion(moving) prediction and risk assessment for AV’s before 2014. Most of these methods are classical but out of date .
This sentence mean the old means could not get good result, but not the impossible of the old methods could improve the sotas, I think it is more suitable for this result that the old methods and theories don’t attract reaseachers because of the unsatisified performance.
Mohammad et al. review behavior-prediction methods at intersections based on drivers’ maneuvers.
A review of deep learning-based approaches focusing on vehicel behavior analysis is presented in 2019 by Mozaffari et al. which describes different criteria to classify only a part of popular methods based on input and output information, and it does not involve some latest published methods.
Two recent publications, similarly focus on trajectory prediction for AVs, but the one provides a review about tracking and trjectory predictionm which only contains methods using deep learning and methods sing stochastic techniquesm adn the other only presents deep learning methods.
Other two surveys use vision information to detect anomaly behavior and two survey human motion prediction, shich is obviously different from the topic of this study.
Thus, this sirvey comprehensively reviews trajectory-prediction methods for AVs proposed over the last two decades. We select heuristic and state-of-the-art trajectory prediction methods for a period of time to compare and summarize.
Note that the historical trajectory information used in prediction methods can be obtained from the perception system [] and vehicle to everything V2X [] and vision-based methods [] are not the focus of this review.
这里说了,感知系统、V2X和基于视觉的工作都不在这里,都给了相应的参考文献,毕竟是个大方向,所以综述也只能偏一个小点来写。
Since traffic participants for instance surrounding vehicles, directly impact the ego vehicle(auto driving), this paper mainly focuses on trajectory-prediction methods for vehicles.
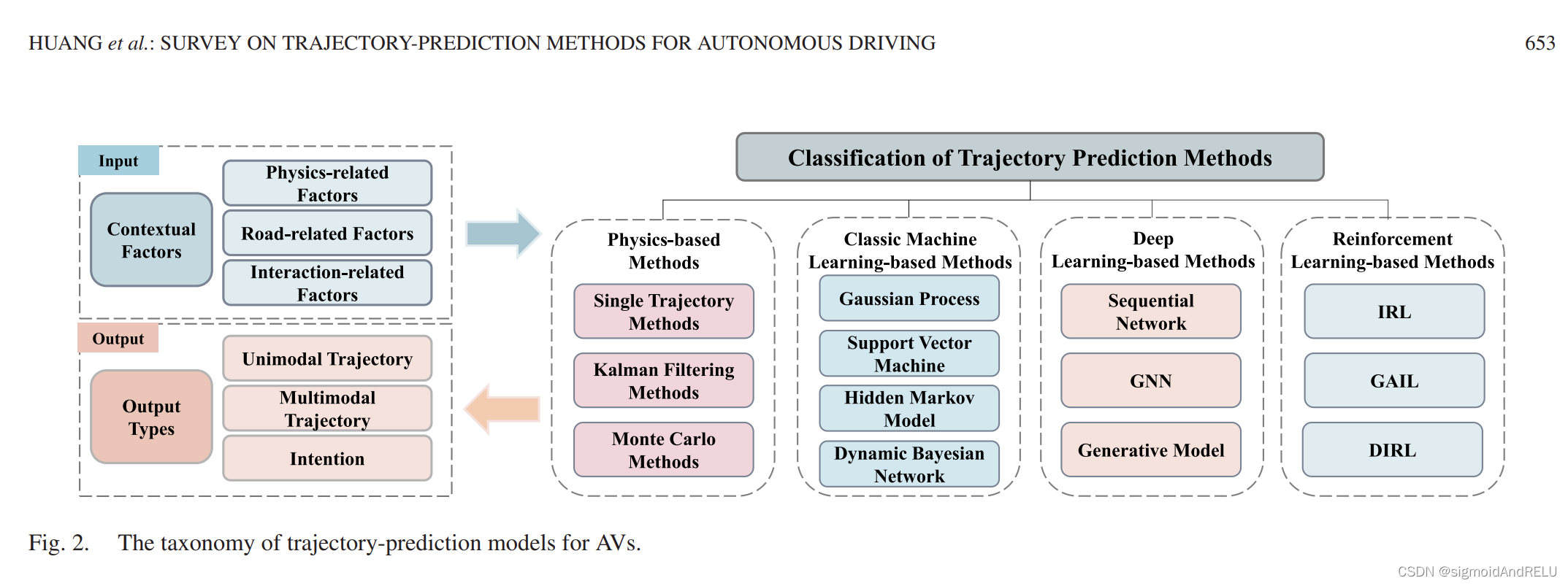
As shown, in Fig.2, this paper will review physics-based methods, classical machine learning-based methods, deep learning-based methods, and reinforcement learning-based methods, respectively. The main contributions of this work can be summarized as follows:
主要贡献如下:
1、The popular trajectory prediction methods for AVs based on physics, classic machine learning, deep learning, and reinforcement learning are elaborately reviewed.
2、The metrics and datasets for evaluating the performance of methods are detailed summarized.
3、The pros and cons(advantage and disadvantage)