如前所述,在前几章内容中笔者简单介绍了内存读写的基本实现方式,这其中包括了CR3切换读写,MDL映射读写,内存拷贝读写,本章将在如前所述的读写函数进一步封装,并以此来实现驱动读写内存浮点数的目的。内存浮点数的读写依赖于读写内存字节的实现,因为浮点数本质上也可以看作是一个字节集,对于单精度浮点数来说这个字节集列表是4字节,而对于双精度浮点数,此列表长度则为8字节。
如下代码片段摘取自本人的LyMemory驱动读写项目,函数ReadProcessMemoryByte用于读取内存特定字节类型的数据,函数WriteProcessMemoryByte则用于写入字节类型数据,完整代码如下所示;
这段代码中依然采用了《驱动开发:内核MDL读写进程内存》中所示的读写方法,通过MDL附加到进程并RtlCopyMemory拷贝数据,至于如何读写字节集只需要循环读写即可实现;
// 署名权
// right to sign one's name on a piece of work
// PowerBy: LyShark
// Email: me@lyshark.com#include <ntifs.h>
#include <windef.h>// 读取内存字节
BYTE ReadProcessMemoryByte(HANDLE Pid, ULONG64 Address, DWORD Size)
{KAPC_STATE state = { 0 };BYTE OpCode;PEPROCESS Process;PsLookupProcessByProcessId((HANDLE)Pid, &Process);// 绑定进程对象,进入进程地址空间KeStackAttachProcess(Process, &state);__try{// ProbeForRead 检查内存地址是否有效, RtlCopyMemory 读取内存ProbeForRead((HANDLE)Address, Size, 1);RtlCopyMemory(&OpCode, (BYTE *)Address, Size);}__except (EXCEPTION_EXECUTE_HANDLER){// 调用KeUnstackDetachProcess解除与进程的绑定,退出进程地址空间KeUnstackDetachProcess(&state);// 让内核对象引用数减1ObDereferenceObject(Process);// DbgPrint("读取进程 %d 的地址 %x 出错", ptr->Pid, ptr->Address);return FALSE;}// 解除绑定KeUnstackDetachProcess(&state);// 让内核对象引用数减1ObDereferenceObject(Process);DbgPrint("[内核读字节] # 读取地址: 0x%x 读取数据: %x \n", Address, OpCode);return OpCode;
}// 写入内存字节
BOOLEAN WriteProcessMemoryByte(HANDLE Pid, ULONG64 Address, DWORD Size, BYTE *OpCode)
{KAPC_STATE state = { 0 };PEPROCESS Process;PsLookupProcessByProcessId((HANDLE)Pid, &Process);// 绑定进程,进入进程的地址空间KeStackAttachProcess(Process, &state);// 创建MDL地址描述符PMDL mdl = IoAllocateMdl((HANDLE)Address, Size, 0, 0, NULL);if (mdl == NULL){return FALSE;}//使MDL与驱动进行绑定MmBuildMdlForNonPagedPool(mdl);BYTE* ChangeData = NULL;__try{// 将MDL映射到我们驱动里的一个变量,对该变量读写就是对MDL对应的物理内存读写ChangeData = (BYTE *)MmMapLockedPages(mdl, KernelMode);}__except (EXCEPTION_EXECUTE_HANDLER){// DbgPrint("映射内存失败");IoFreeMdl(mdl);// 解除映射KeUnstackDetachProcess(&state);// 让内核对象引用数减1ObDereferenceObject(Process);return FALSE;}// 写入数据到指定位置RtlCopyMemory(ChangeData, OpCode, Size);DbgPrint("[内核写字节] # 写入地址: 0x%x 写入数据: %x \n", Address, OpCode);// 让内核对象引用数减1ObDereferenceObject(Process);MmUnmapLockedPages(ChangeData, mdl);KeUnstackDetachProcess(&state);return TRUE;
}
实现读取内存字节集并将读入的数据放入到LySharkReadByte字节列表中,这段代码如下所示,通过调用ReadProcessMemoryByte都内存字节并每次0x401000 + i在基址上面增加变量i以此来实现字节集读取;
// 驱动入口地址
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
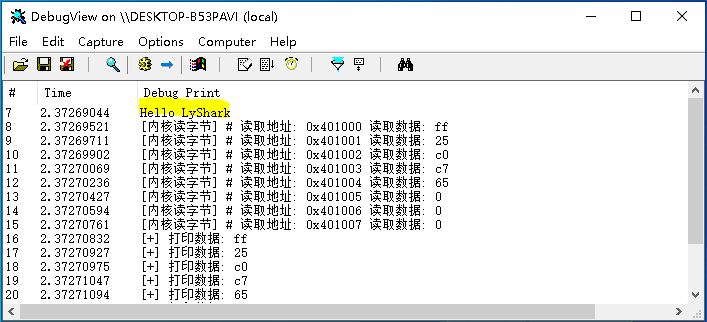
{DbgPrint("Hello LyShark \n");// 读内存字节集BYTE LySharkReadByte[8] = { 0 };for (size_t i = 0; i < 8; i++){LySharkReadByte[i] = ReadProcessMemoryByte(4884, 0x401000 + i, 1);}// 输出读取的内存字节for (size_t i = 0; i < 8; i++){DbgPrint("[+] 打印数据: %x \n", LySharkReadByte[i]);}Driver->DriverUnload = UnDriver;return STATUS_SUCCESS;
}
运行如上代码片段,你会看到如下图所示的读取效果;
那么如何实现写内存字节集呢?其实写入内存字节集与读取基本类似,通过填充LySharkWriteByte字节集列表,并调用WriteProcessMemoryByte函数依次循环字节集列表即可实现写出字节集的目的;
// 驱动入口地址
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{DbgPrint("Hello LyShark \n");// 内存写字节集BYTE LySharkWriteByte[8] = { 0x90, 0x90, 0x90, 0x90, 0x90, 0x90, 0x90, 0x90 };for (size_t i = 0; i < 8; i++){BOOLEAN ref = WriteProcessMemoryByte(4884, 0x401000 + i, 1, LySharkWriteByte[i]);DbgPrint("[*] 写出状态: %d \n", ref);}Driver->DriverUnload = UnDriver;return STATUS_SUCCESS;
}
运行如上代码片段,即可将LySharkWriteByte[8]中的字节集写出到内存0x401000 + i的位置处,输出效果图如下所示;
接下来不如本章的重点内容,首先如何实现读内存单精度与双精度浮点数的目的,实现原理是通过读取BYTE类型的前4或者8字节的数据,并通过*((FLOAT*)buffpyr)将其转换为浮点数,通过此方法即可实现字节集到浮点数的转换,而决定是单精度还是双精度则只是一个字节集长度问题,这段读写代码实现原理如下所示;
// 读内存单精度浮点数
FLOAT ReadProcessFloat(DWORD Pid, ULONG64 Address)
{BYTE buff[4] = { 0 };BYTE* buffpyr = buff;for (DWORD x = 0; x < 4; x++){BYTE item = ReadProcessMemoryByte(Pid, Address + x, 1);buff[x] = item;}return *((FLOAT*)buffpyr);
}// 读内存双精度浮点数
DOUBLE ReadProcessMemoryDouble(DWORD Pid, ULONG64 Address)
{BYTE buff[8] = { 0 };BYTE* buffpyr = buff;for (DWORD x = 0; x < 8; x++){BYTE item = ReadProcessMemoryByte(Pid, Address + x, 1);buff[x] = item;}return *((DOUBLE*)buffpyr);
}// 驱动卸载例程
VOID UnDriver(PDRIVER_OBJECT driver)
{DbgPrint("Uninstall Driver \n");
}// 驱动入口地址
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{DbgPrint("Hello LyShark \n");// 读取单精度FLOAT fl = ReadProcessFloat(4884, 0x401000);DbgPrint("[读取单精度] = %d \n", fl);// 读取双精度浮点数DOUBLE fl = ReadProcessMemoryDouble(4884, 0x401000);DbgPrint("[读取双精度] = %d \n", fl);Driver->DriverUnload = UnDriver;return STATUS_SUCCESS;
}
如上代码就是实现浮点数读写的关键所在,这段代码中的浮点数传值如果在内核中会提示无法解析的外部符号 _fltused此处只用于演示核心原理,如果想要实现不报错,该代码中的传值操作应在应用层进行,而传入参数也应改为字节类型即可。
同理,对于写内存浮点数而言依旧如此,只是在接收到用户层传递参数后应对其dtoc双精度浮点数转为CHAR或者ftoc单精度浮点数转为CHAR类型,再写出即可;
// 将DOUBLE适配为合适的Char类型
VOID dtoc(double dvalue, unsigned char* arr)
{unsigned char* pf;unsigned char* px;unsigned char i;// unsigned char型指针取得浮点数的首地址pf = (unsigned char*)&dvalue;// 字符数组arr准备存储浮点数的四个字节,px指针指向字节数组arrpx = arr;for (i = 0; i < 8; i++){// 使用unsigned char型指针从低地址一个字节一个字节取出*(px + i) = *(pf + i);}
}// 将Float适配为合适的Char类型
VOID ftoc(float fvalue, unsigned char* arr)
{unsigned char* pf;unsigned char* px;unsigned char i;// unsigned char型指针取得浮点数的首地址pf = (unsigned char*)&fvalue;// 字符数组arr准备存储浮点数的四个字节,px指针指向字节数组arrpx = arr;for (i = 0; i < 4; i++){// 使用unsigned char型指针从低地址一个字节一个字节取出*(px + i) = *(pf + i);}
}// 写内存单精度浮点数
BOOL WriteProcessMemoryFloat(DWORD Pid, ULONG64 Address, FLOAT write)
{BYTE buff[4] = { 0 };ftoc(write, buff);for (DWORD x = 0; x < 4; x++){BYTE item = WriteProcessMemoryByte(Pid, Address + x, buff[x], 1);buff[x] = item;}return TRUE;
}// 写内存双精度浮点数
BOOL WriteProcessMemoryDouble(DWORD Pid, ULONG64 Address, DOUBLE write)
{BYTE buff[8] = { 0 };dtoc(write, buff);for (DWORD x = 0; x < 8; x++){BYTE item = WriteProcessMemoryByte(Pid, Address + x, buff[x], 1);buff[x] = item;}return TRUE;
}// 驱动卸载例程
VOID UnDriver(PDRIVER_OBJECT driver)
{DbgPrint("Uninstall Driver \n");
}// 驱动入口地址
NTSTATUS DriverEntry(IN PDRIVER_OBJECT Driver, PUNICODE_STRING RegistryPath)
{DbgPrint("Hello LyShark \n");// 写单精度FLOAT LySharkFloat1 = 12.5;INT fl = WriteProcessMemoryFloat(4884, 0x401000, LySharkFloat1);DbgPrint("[写单精度] = %d \n", fl);// 读取双精度浮点数DOUBLE LySharkFloat2 = 12.5;INT d1 = WriteProcessMemoryDouble(4884, 0x401000, LySharkFloat2);DbgPrint("[写双精度] = %d \n", d1);Driver->DriverUnload = UnDriver;return STATUS_SUCCESS;
}