上一题比较简单,下面来一道比较难的题目。
假设有排成一行的N个位置,记为1~N,N 一定大于或等于 2
开始时机器人在其中的M位置上(M 一定是 1~N 中的一个)
如果机器人来到1位置,那么下一步只能往右来到2位置;
如果机器人来到N位置,那么下一步只能往左来到 N-1 位置;
如果机器人来到中间位置,那么下一步可以往左走或者往右走;
规定机器人必须走 K 步,最终能来到P位置(P也是1~N中的一个)的方法有多少种
给定四个参数 N、M、K、P,返回方法数。
解题思路:
1. 如果机器人在1的位置,只能从左到右
2.如果机器人在N的位置,只能从右到左
3.如果机器人在中间,既可以往右、也可以往左
现在的题目是要求返回多少种走法,也就是只要能到达目的地,并且步数足够,我们随意走都可以。
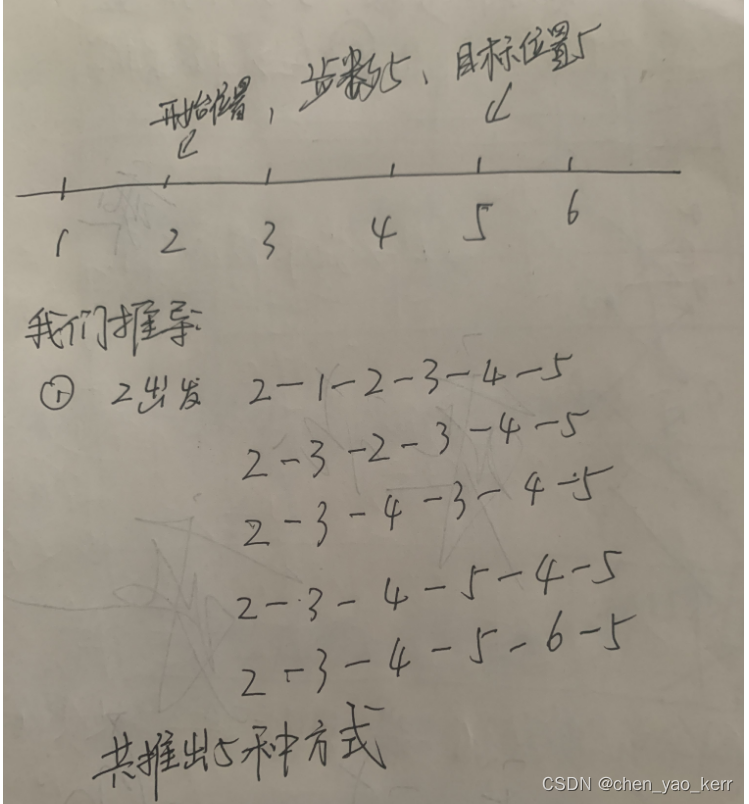
遇到这种题目,绘图是最好的方式:
假设一共有6个位置,从2位置出发,走5步,到达位置5,一共有多少种走法
递归方式
package code03.动态规划_07;/*** 假设有排成一行的N个位置,记为1~N,N 一定大于或等于 2* 开始时机器人在其中的M位置上(M 一定是 1~N 中的一个)* 如果机器人来到1位置,那么下一步只能往右来到2位置;* 如果机器人来到N位置,那么下一步只能往左来到 N-1 位置;* 如果机器人来到中间位置,那么下一步可以往左走或者往右走;* 规定机器人必须走 K 步,最终能来到P位置(P也是1~N中的一个)的方法有多少种* 给定四个参数 N、M、K、P,返回方法数。*/
public class Robot_02 {/**** @param mStart M 开始位置* @param kSteps K 步数* @param nAll N 长度* @param pAim P 目的地位置* @return*/public static int way1(int mStart, int kSteps, int nAll, int pAim){return process(mStart, kSteps, nAll, pAim);}public static int process ( int mStart, int kSteps, int nAll, int pAim){//步数为0,没法走if (kSteps == 0) {return mStart == pAim ? 1 : 0;}//只能往右走if (mStart == 1) {return process(mStart + 1, kSteps-1, nAll, pAim);}//只能往左走if (mStart == nAll) {return process(nAll-1, kSteps-1, nAll, pAim);}//中间位置,即可往左,也可往右,需要统计出往左往右的和return process(mStart +1, kSteps-1, nAll, pAim)+ process( mStart -1, kSteps-1, nAll, pAim);}public static void main(String[] args) {System.out.println(way1(2,5,6,5));}
}
同样的问题,我们分析可以得到:
在2位置,剩余5步,有5中走法
在3位置,剩余4步,有4种走法
在4位置,剩余3步,有3种走法
在5位置,剩余2步,有2种走法;
在6位置,剩余1步,有1种走法
中间存在来来回回重复的走法,这说明我们存在重复的推导结果,自然就过渡到递归+动态规划的方式进行优化了。
递归 + 动态规划
package code03.动态规划_07;/*** 假设有排成一行的N个位置,记为1~N,N 一定大于或等于 2* 开始时机器人在其中的M位置上(M 一定是 1~N 中的一个)* 如果机器人来到1位置,那么下一步只能往右来到2位置;* 如果机器人来到N位置,那么下一步只能往左来到 N-1 位置;* 如果机器人来到中间位置,那么下一步可以往左走或者往右走;* 规定机器人必须走 K 步,最终能来到P位置(P也是1~N中的一个)的方法有多少种* 给定四个参数 N、M、K、P,返回方法数。*/
public class Robot_02_opt1 {/*** @param mStart M 开始位置 [0-nAll]* @param kSteps K 步数* @param nAll N 长度* @param pAim P 目的地位置* @return*/public static int way1(int mStart, int kSteps, int nAll, int pAim){/*** 位置是1-N, 每一个位置都存在不同的走法,以每个位置为行,那么行的范围就是1-N* 由于java数组下标从0开始,想要获取1-N范围,长度需要加1** 我们将剩余步数为列,这样每个位置剩余步数就可以很直观的观察到*/int[][] dp = new int[nAll + 1][kSteps+1]; //剩余步数为横坐标,当前位置为纵坐标for (int i = 0; i < dp.length; i++) {for(int j = 0; j <dp[i].length; j++) {dp[i][j] = -1;}}int result = process(mStart, kSteps, nAll, pAim, dp);return process(mStart, kSteps, nAll, pAim, dp);}public static int process ( int mStart, int kSteps, int nAll, int pAim, int[][] dp){if (dp[mStart][kSteps] != -1) {return dp[mStart][kSteps];}int result;if (kSteps == 0) {result = mStart == pAim ? 1 : 0;}//只能往右走else if (mStart == 1) {result = process(mStart + 1, kSteps-1, nAll, pAim, dp);}//只能往左走else if (mStart == nAll) {result = process(nAll-1, kSteps-1, nAll, pAim, dp);}//中间位置,即可往左,也可往右,需要统计出往左往右的和else{result = process(mStart +1, kSteps-1, nAll, pAim, dp)+ process( mStart -1, kSteps-1, nAll, pAim, dp);}dp[mStart][kSteps] = result;return result;}public static void main(String[] args) {System.out.println(way1(2,5,6,5));}
}
纯动态规划方式
1. 根据递归的方式,我们知道,如果剩余步数为0,那么开始位置如果正好在目标位置处,就算是1种走法。并且可以推导二维数组的第一列,第五行为1,其他都为0
if (kSteps == 0) {return mStart == pAim ? 1 : 0;
}
| x | x | x | x | x | x |
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 1 | |||||
| 0 |
2. 根据递归方式,如果在最左端,只能往右走; 如果在最右端,只能往左走。目前第一列数据已经推导出来了。因此需要根据第一列进行推导。
//只能往右走
if (mStart == 1) {return process(mStart + 1, kSteps-1, nAll, pAim);
}
//只能往左走
if (mStart == nAll) {return process(nAll-1, kSteps-1, nAll, pAim);
}
根据递归代码,我们知道,无论是往左走,还是往右走。
第二行第二列,也就是dp[1][1], 都是下一行的前一列数据. 而最后一行最后一列,都是上一行前一列的数据。推导结果》
| x | x | x | x | x | x |
| 0 | 0 | ||||
| 0 | |||||
| 0 | |||||
| 0 | |||||
| 1 | |||||
| 0 | 1 |
3. 根据递归方法中,如果在中间位置。需要得到上一行和下一行的前一列累加值
//中间位置,即可往左,也可往右,需要统计出往左往右的和 return process(mStart +1, kSteps-1, nAll, pAim)+ process( mStart -1, kSteps-1, nAll, pAim);
推导出结果
| x | x | x | x | x | x |
| 0 | 0 | ||||
| 0 | 0 | ||||
| 0 | 0 | ||||
| 0 | 1 | ||||
| 1 | 0 | ||||
| 0 | 1 |
依次类推,得到的最终值为:
| 剩余0 | 剩余1 | 剩余2 | 剩余3 | 剩余4 | 剩余5 | |
| 目标位置0 | x | x | x | x | x | x |
| 目标位置1 | 0 | 0 | 0 | 0 | 1 | 0 |
| 目标位置2 | 0 | 0 | 0 | 1 | 0 | 5 |
| 目标位置3 | 0 | 0 | 1 | 0 | 4 | 0 |
| 目标位置4 | 0 | 1 | 0 | 3 | 0 | 9 |
| 目标位置5 | 1 | 0 | 2 | 0 | 5 | 0 |
| 目标位置6 | 0 | 1 | 0 | 2 | 0 | 9 |
根据题目我们知道,位置是从1到N的,也就是说位置不存在0的情况。而我们这张表位置作为行,剩余步数作为列的。因此位置为0直接忽略。
假设一共有6个位置,从2位置出发,走5步,到达位置5,一共有多少种走法
dp[2][5]可得到结果为5,即5中种走法。
package code03.动态规划_07;/*** 假设有排成一行的N个位置,记为1~N,N 一定大于或等于 2* 开始时机器人在其中的M位置上(M 一定是 1~N 中的一个)* 如果机器人来到1位置,那么下一步只能往右来到2位置;* 如果机器人来到N位置,那么下一步只能往左来到 N-1 位置;* 如果机器人来到中间位置,那么下一步可以往左走或者往右走;* 规定机器人必须走 K 步,最终能来到P位置(P也是1~N中的一个)的方法有多少种* 给定四个参数 N、M、K、P,返回方法数。*/
public class Robot_02_opt2 {/**** @param mStart M 开始位置* @param kSteps K 步数* @param nAll N 长度* @param pAim P 目的地位置* @return*/public static int way(int nAll, int mStart, int pAim, int kSteps){if (nAll < 2 || mStart < 1 || mStart > nAll || pAim < 1 || pAim > nAll || kSteps < 1) {return -1;}/*** 位置是1-N, 每一个位置都存在不同的走法,以每个位置为行,那么行的范围就是1-N* 由于java数组下标从0开始,想要获取1-N范围,长度需要加 1** 我们将剩余步数为列,这样每个位置剩余步数就可以很直观的观察到.* 同理,列的长度也需要加 1。** 其实,此处列无所谓的,哪怕就是100也行。只不过如果是100,那将会推导出* 走100的情况,无谓浪费资源。 最好的方式就是根据实际的业务,你要我推导* 几步,我就推导几步,节约资源*/int[][] dp = new int[nAll+1][kSteps+1];//剩余步数为0,推导出对应哪一行为1dp[pAim][0] = 1;//根据剩余步数,推导出每一个位置能够走到目标位置的结果for (int col = 1; col <= kSteps; col++){//第2行的每一列值, 对应的都是第3行前一列值dp[1][col] = dp[2][col-1];//从第二行开始,倒数第二行执行完后结束for (int row = 2; row < nAll; row++){//中间行,等于上一行和下一行的前一列的和dp[row][col] = dp[row-1][col-1] + dp[row+1][col-1];}//最后一行,每一列值都对应上一行的前一列的值dp[nAll][col] = dp[nAll-1][col-1];}//根据当前哪个位置,剩余步数。获取到目标位置的不同走法return dp[mStart][kSteps];}public static void main(String[] args) {System.out.println(way(6,2,5,5));}
}