目录
- 实验目的
- 测试环境
- Python库需求
- Benewake(北醒) TF雷达接口及通讯协议说明
- 接口定义
- Modbus通信协议说明
- 功能码说明
- 接线示意图
- 库安装说明
- 例程
- 运行与测试
实验目的
实现485接口系列雷达Modbus协议在Python上实现功能配置。
本例程界面分为主菜单、测距子菜单、配置子菜单,功能如下:
- 主菜单:
-
设备查找(扫描已经忘记波特率或站号的Modbus雷达设备)
-
设备测距(已知雷达设备的波特率和站号,进行多次测距)
-
雷达配置(能够修改雷达波特率、雷达id、恢复出厂设置)
-
退出程序
-
测试环境
Window 10、Python 3.10.2
Python库需求
- serial 串口库(自带)
- time 定时库(自带)
- modbus_tk(1.1.3)(需要安装)
注:本例程因为是自动扫描COM口,建议在使用的时候关闭其它无关的COM口
Benewake(北醒) TF雷达接口及通讯协议说明
接口定义
| 编号 | 颜色 | 引脚 | 功能 |
|---|---|---|---|
| 1 | 红色 | VCC | 供电 |
| 2 | 白色 | RS485-B | RS485-B总线 |
| 3 | 绿色 | RS485-A | RS485-A总线 |
| 4 | N/A | / | / |
| 5 | 蓝色 | / | / |
| 6 | 棕色 | / | / |
| 7 | 黑色 | GND | 地线 |
注:RS485 和 CAN 接口为不同硬件版本,请勿将串口调试线与 RS485 或 CAN 总线混接,否则会导致雷达 MCU 损坏。
Modbus通信协议说明
RS485 接口下默认为 Modbus 协议,具体通讯协议见表 2。波特率默认为 115200,地址默认为 0x01。
| 项目 | 内容 |
|---|---|
| 通讯协议 | RS485 |
| 波特率 | 115200 |
| 数据位 | 8 |
| 停止位 | 1 |
| 校验位 | 无 |
功能码说明

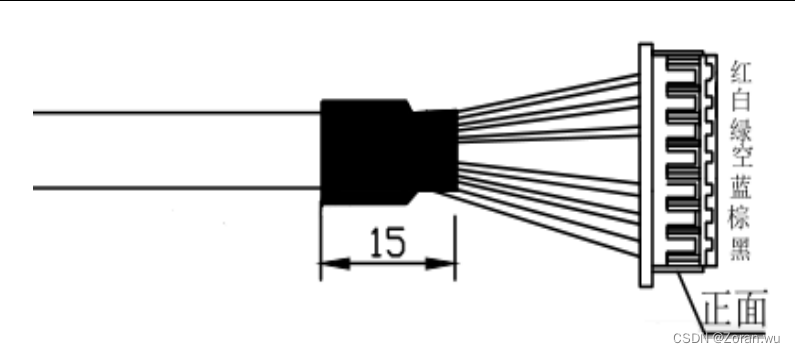
接线示意图
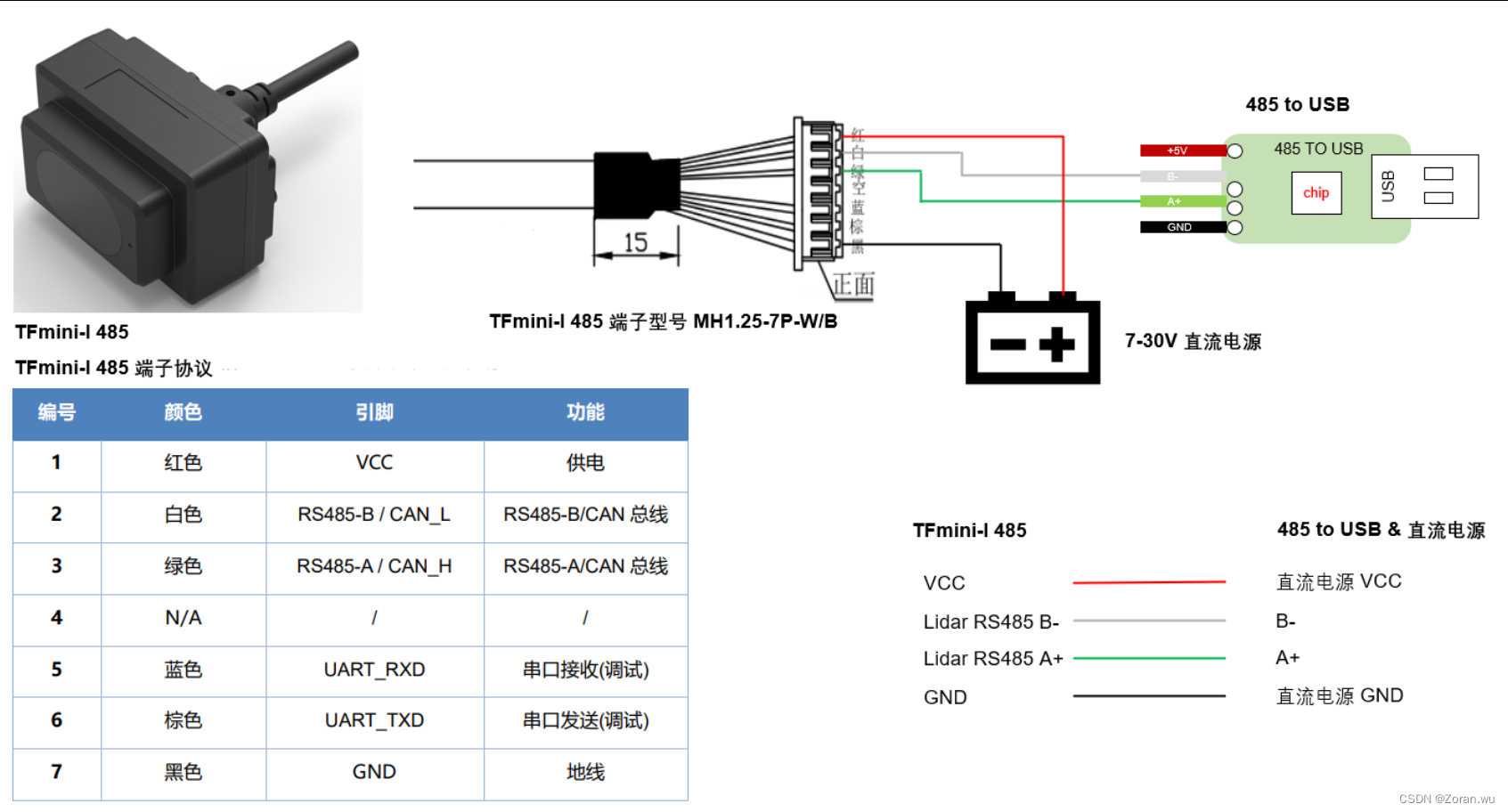
注:线路颜色仅供参考,具体参照实际线路颜色定义
库安装说明
确保已经完整安装Python(并安装PIP)
打开CMD窗口分别输入以下指令
pip install modbus_tk==1.1.3
注:为了防止程序运行错误,建议使用以上库版本
例程
已生成EXE文件,按上面介绍的接线方式接好后直接双击即可打开测试

BW_TFMD_V1.0_20230511.exe文件链接:https://github.com/ahhlyy/lidar_project/tree/main/dist
例程BW_TFMD_V1.0_20230511.py文件链接: https://github.com/ahhlyy/lidar_project
运行与测试
双击EXE文件后例程运行:
-
设备查找功能演示

-
已知雷达波特率和id,进行设备测距(波特率默认为 115200,地址默认为 0x01)
注:测距结束后,提供波特率和id的修改选项,可根据需要进行修改

-
对雷达设备进行配置,如修改波特率、修改id、恢复出厂设置
-
修改波特率

-
修改id

-
恢复出厂设置

-