重要参考:
课程链接:https://www.bilibili.com/video/BV1Ci4y1L7ZZ
讲义链接:Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
8.3.3 电机测速01_理论
测速实现是调速实现的前提,本节主要介绍AB相增量式编码器测速原理。
1.概念
百度百科关于编码器介绍如下:
编码器(encoder)是将信号(如比特流)或数据进行编制、转换为可用以通讯、传输和存储的信号形式的设备。编码器把角位移或直线位移转换成电信号,前者称为码盘,后者称为码尺。按照读出方式编码器可以分为接触式和非接触式两种;按照工作原理编码器可分为增量式和绝对式两类。增量式编码器是将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小。绝对式编码器的每一个位置对应一个确定的数字码,因此它的示值只与测量的起始和终止位置有关,而与测量的中间过程无关。
2.测速原理
关于编码器相关概念简单了解即可,在此需要着重介绍的是 AB相增量式编码器测速原理:
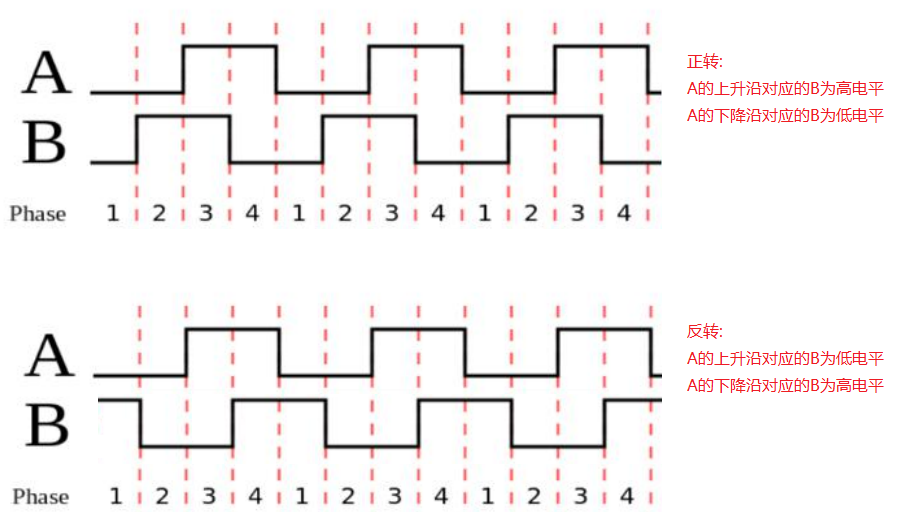
AB相编码器主要构成为A相与B相,每一相每转过单位的角度就发出一个脉冲信号(一圈可以发出N个脉冲信号),A相、B相为相互延迟1/4周期的脉冲输出,根据延迟关系可以区别正反转,而且通过取A相、B相的上升和下降沿可以进行单频或2倍频或4倍频测速。
3.测速举例
假设编码器旋转1圈输出11个脉冲,减速比为 90。伪代码如下:
单频计数:
//设置一个计数器
int count = 0;
//当A为上升沿时
if(B为高电平){count++;
}else {count--;
}
//....
//速度=单位时间内统计的脉冲的个数 / (11*90) / 单位时间2倍频计数:
//设置一个计数器
int count = 0;
//当A为上升沿时
if(B为高电平){count++;
}else {count--;
}
//当A为下降沿时
if(B为低电平){count++;
}else {count--;
}//....
//速度=单位时间内统计的脉冲的个数 / (11*2*90) / 单位时间4倍频计数:
//设置一个计数器
int count = 0;
//当A为上升沿时
if(B为高电平){count++;
}else {count--;
}
//当A为下降沿时
if(B为低电平){count++;
}else {count--;
}
//当B为上升沿时
if(A为低电平){count++;
} else {count--;
}
//当B为下降沿时
if(A为高电平){count++;
} else {count--;
}
//....
//速度=单位时间内统计的脉冲的个数 / (11*4*90) / 单位时间8.3.4 电机测速02_实现
需求:统计并输出电机转速。
思路:先统计单位时间内以单频或2倍频或4倍频的方式统计脉冲数,再除以一圈对应的脉冲数,最后再除以时间所得即为电机转速。
核心:计数时,需要在A相或B相的上升沿或下降沿触发时,实现计数,在此需要使用中断引脚与中断函数。
Arduino Mega 2560 的中断引脚:2 (interrupt 0), 3 (interrupt 1),18 (interrupt 5), 19 (interrupt 4), 20 (interrupt 3), 21 (interrupt 2)
实现流程:
- 编写Arduino程序先实现脉冲数统计;
- 编写Arduino程序再实现转速计算相关实现;
- 上传到Arduino并测试。
1.编码实现脉冲统计
核心知识点:attachInterrupt()函数(请参考 8.2.2 介绍)。
代码:
/** 测速实现:* 阶段1:脉冲数统计* 阶段2:速度计算* * 阶段1:* 1.定义所使用的中断引脚,以及计数器(使用 volatile 修饰)* 2.setup 中设置波特率,将引脚设置为输入模式* 3.使用 attachInterupt() 函数为引脚添加中断出发时机以及中断函数* 4.中断函数编写计算算法,并打印* A.单频统计只需要统计单相上升沿或下降沿* B.2倍频统计需要统计单相的上升沿和下降沿* C.4倍频统计需要统计两相的上升沿和下降沿* 5.上传并查看结果* * */
int motor_A = 21;//中端口是2
int motor_B = 20;//中断口是3
volatile int count = 0;//如果是正转,那么每计数一次自增1,如果是反转,那么每计数一次自减1 void count_A(){//单频计数实现//手动旋转电机一圈,输出结果为 一圈脉冲数 * 减速比/*if(digitalRead(motor_A) == HIGH){if(digitalRead(motor_B) == LOW){//A 高 B 低count++; } else {//A 高 B 高count--; }}*///2倍频计数实现//手动旋转电机一圈,输出结果为 一圈脉冲数 * 减速比 * 2if(digitalRead(motor_A) == HIGH){if(digitalRead(motor_B) == HIGH){//A 高 B 高count++; } else {//A 高 B 低count--; }} else {if(digitalRead(motor_B) == LOW){//A 低 B 低count++; } else {//A 低 B 高count--; } }}//与A实现类似
//4倍频计数实现
//手动旋转电机一圈,输出结果为 一圈脉冲数 * 减速比 * 4
void count_B(){if(digitalRead(motor_B) == HIGH){if(digitalRead(motor_A) == LOW){//B 高 A 低count++;} else {//B 高 A 高count--;}} else {if(digitalRead(motor_A) == HIGH){//B 低 A 高count++;} else {//B 低 A 低count--;}}}void setup() {Serial.begin(57600);//设置波特率 pinMode(motor_A,INPUT);pinMode(motor_B,INPUT);attachInterrupt(2,count_A,CHANGE);//当电平发生改变时触发中断函数//四倍频统计需要为B相也添加中断attachInterrupt(3,count_B,CHANGE);
}void loop() {//测试计数器输出delay(2000);Serial.println(count);}2.转速计算
思路:需要定义一个开始时间(用于记录每个测速周期的开始时刻),还需要定义一个时间区间(比如50毫秒),时时获取当前时刻,当当前时刻 - 上传结束时刻 >= 时间区间时,就获取当前计数并根据测速公式计算时时速度,计算完毕,计数器归零,重置开始时间
核心知识点:当使用中断函数中的变量时,需要先禁止中断noInterrupts(),调用完毕,再重启中断interrupts()(关于noInterrupts与interrupts请参考 8.2.2 介绍)。
代码(核心):
2中代码除了 loop 实现,无需修改。
int reducation = 90;//减速比,根据电机参数设置,比如 15 | 30 | 60
int pulse = 11; //编码器旋转一圈产生的脉冲数该值需要参考商家电机参数
int per_round = pulse * reducation * 4;//车轮旋转一圈产生的脉冲数
long start_time = millis();//一个计算周期的开始时刻,初始值为 millis();
long interval_time = 50;//一个计算周期 50ms
double current_vel;//获取当前转速的函数
void get_current_vel(){long right_now = millis(); long past_time = right_now - start_time;//计算逝去的时间if(past_time >= interval_time){//如果逝去时间大于等于一个计算周期//1.禁止中断noInterrupts();//2.计算转速 转速单位可以是秒,也可以是分钟... 自定义即可current_vel = (double)count / per_round / past_time * 1000 * 60;//3.重置计数器count = 0;//4.重置开始时间start_time = right_now;//5.重启中断interrupts();Serial.println(current_vel);}
}void loop() {delay(10);get_current_vel();}3.测试
将代码上传至Arduino,打开出口监视器,手动旋转电机,可以查看到转速信息。