参考
Practical Search Techniques in Path Planning for Autonomous Driving 混合 A* 论文
Sensor-Based Exploration: The Hierarchical Generalized Voronoi Graph Voronoi 图论文
认识 Voronoi ,泰森多边形 voronoi 介绍和应用
Voronoi Field 和 Voronoi Diagram
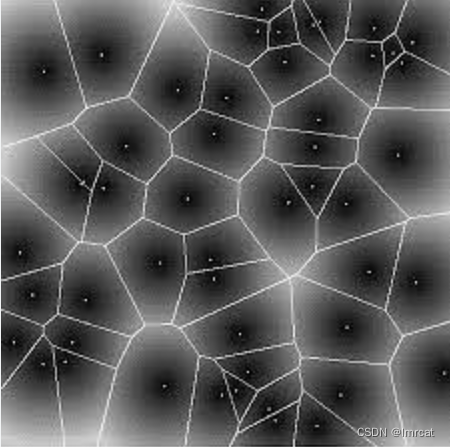
沃罗诺伊图 Voronoi Diagram 又称作狄利克雷镶嵌或者泰森多边形。是一种离散区域分割方法。
-
离散性:将空间划分为离散的区域,每个区域与一个生成点相关联。
-
连续性:Voronoi边界是由相邻的生成点之间的距离确定的连续线段。
-
局部性:每个点的Voronoi区域仅由其最近的邻近点决定,与其他点的位置无关。

沃罗诺伊场 Voronoi Field 是一个连续的函数场,用于描述空间中的距离信息。
-
连续性:Voronoi field 是一个连续的函数场,而不是离散的区域划分。
-
定义:它基于一组特定点,为每个点定义一个场值,表示该点到最近的邻近点的距离。
-
插值:Voronoi field 可以通过插值方法(如线性插值或高斯过程)计算出在整个空间中的值。
混合 A* 中的 Voronoi 势场代价
用 voronoi 势场中路径点的势场值来描述路径与障碍物接近程度之间。
voronoi 势场定义如下:
是 (x,y) 到最近障碍物的距离,
是 (x,y) 到所在 Generalized Voronoi Diagram (GVD) 区域的边的最近距离。
是控制势场衰减率常数,
是控制势场最大有效范围常数,
是地图中距离障碍物最远的距离。
Voronoi 场性质
-
;
-
在 (x,y) 上连续,因为
和
不会同时为 0;
-
只有在障碍物内才会达到最大值;
-
Voronoi 场优势
Voronoi 场的主要优势在于,场值与可导航空间(自由空间)成比例关系,即使是狭窄的开口,由于比例缩放,依然存在低势场区域(GVD 的边)。
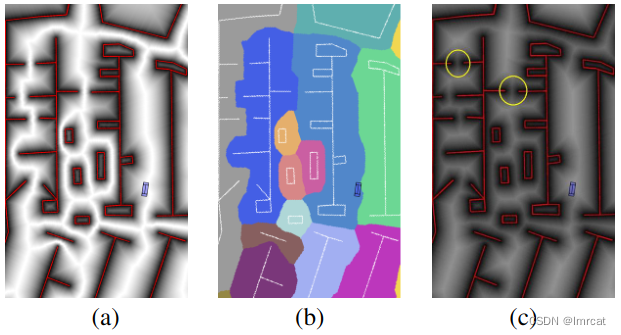
图 fig.3 中,(a) 显示 Voronoi 势场,红色是障碍物,灰色部分是表示势场强度,颜色越黑,说明此处势场越强,距离障碍物越近。(b) 显示对应的 Voronoi 图,其中色块的边界就是势场为 0 的空间,在 (b) 中可以看到永远存在一条势场值为 0 的通道!(c) 表示在标准势场中,即使是狭窄通道仍具有高势能区域。
!!!注意!!!
图 3(c) 在原文中称为 standard potential field 标准势场,什么是标准势场?没有找到好的解释。在标准势场中,狭窄通道中仍有高势能区域。这说明在“标准势场”中,自由区间是高势能区域,障碍物是低势能区域。而在 costmap 中,自由空间是低数值区域,障碍物是高数值区域。
图 3(c) 中高势能区域是浅色,低势能区域是深色,这与 rgd 图一致,说明原文的标准势场图是用 rgb 图画的。
Voronoi 势场反映地图障碍物的相对距离,即使在狭窄区域也不会完全封闭。也就是说 Voronoi 势场图中,在非完全封闭区域,始终存在一条高势能通道。Voronoi 势场图可以用来找地图中离障碍物最远的通道。
Voronoi 图可以导出自由空间骨架,但对于运动学非完整性车辆或机器而言,这样的路径是不可直接使用。
Voronoi 势场的 costmap2d 插件实现,测试
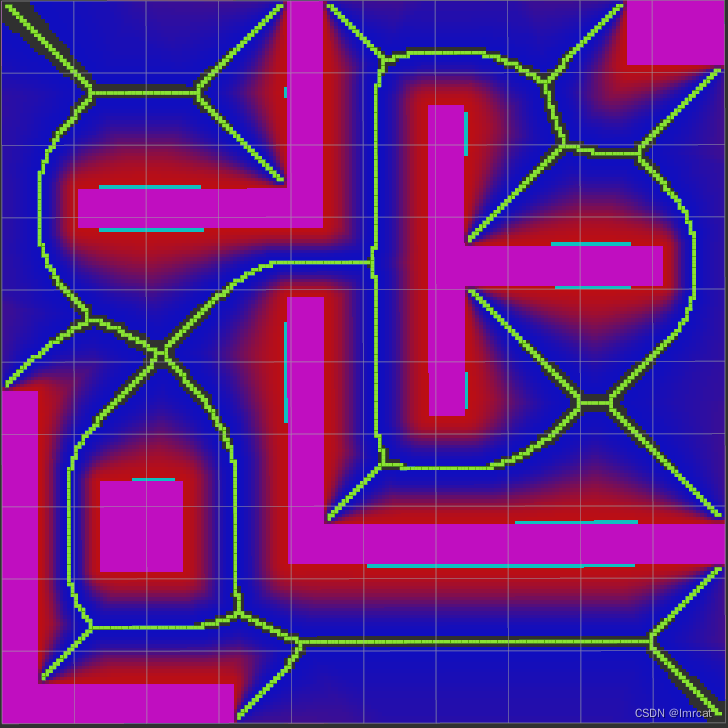
Voronoi 势场用 costmap 显示,cost 值 254u 和 255u 作为障碍物显示。灰图是 costmap 的 map 显示。
绿色网络是 gridcells 数据格式,显示 gvd 网络。
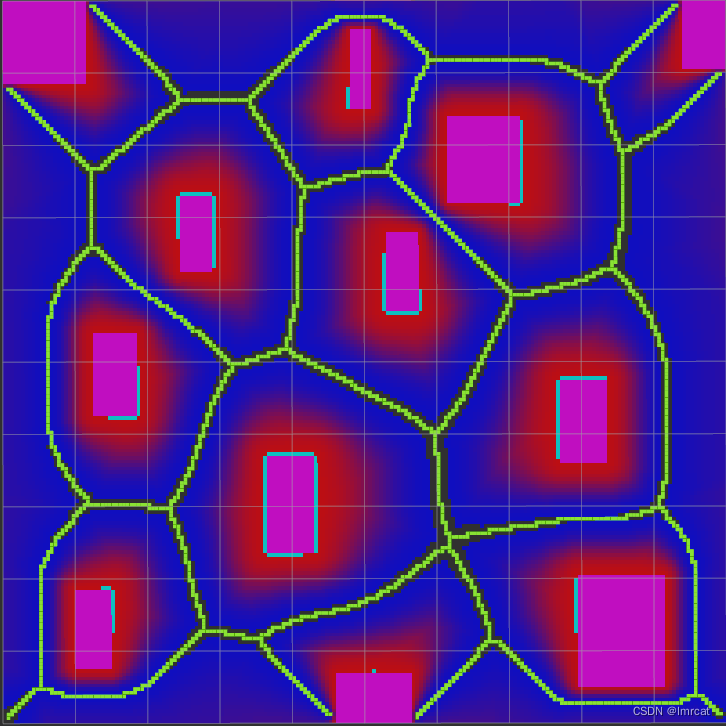

更多的测试发现,对于不规则的地图 gvd 网络混乱,对于“凹”区域总会有 gdv 网络连接,其实观察原论文的图片也有这种问题
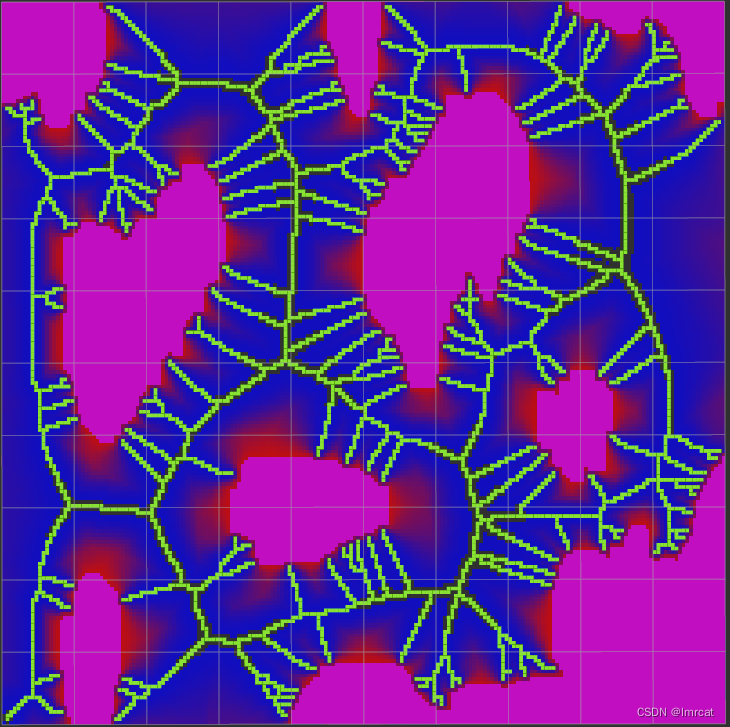
凹地图的 gvd 分支剪枝效果不佳,需要自己另外实现效果。
我的做法是从提取的 gvd 图中计算交点和端点,从端点处开始沿着分支消除,遇到交点停止。
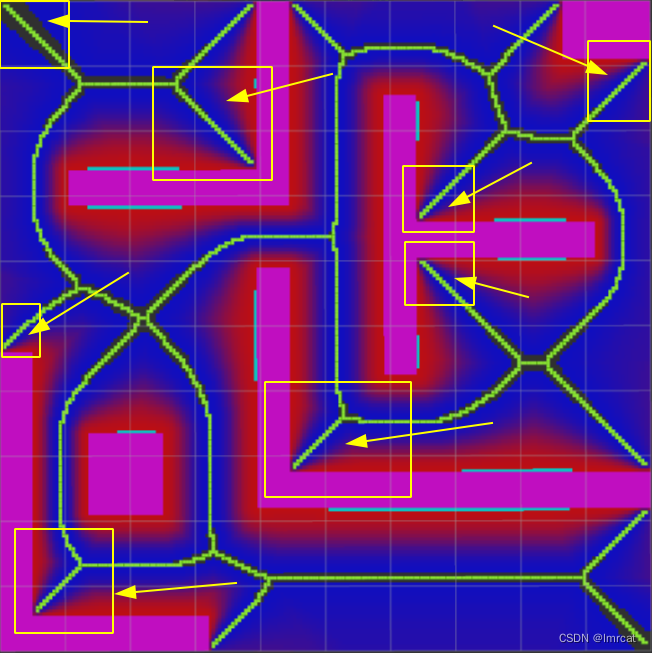
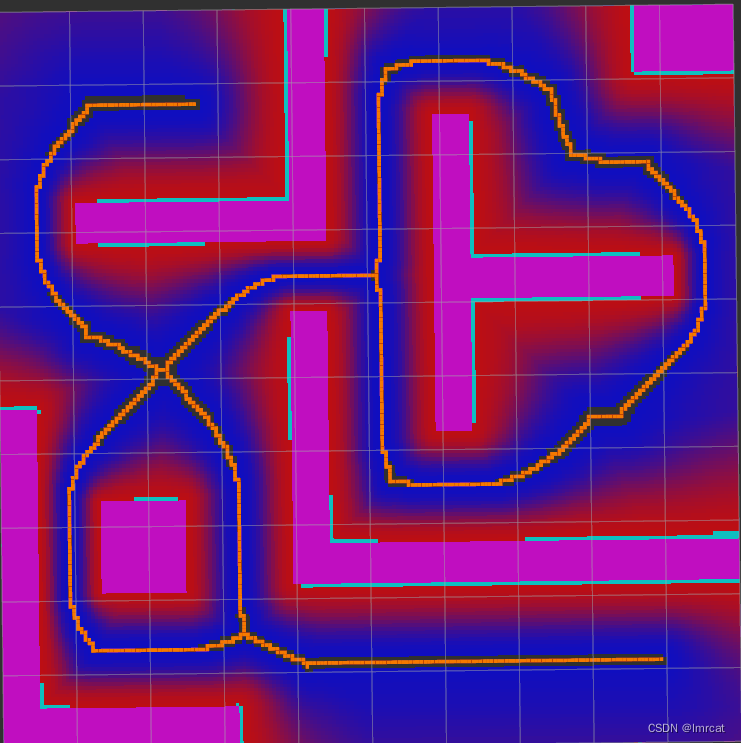
图 fig.9 中橙色 girdcells 数据就是消除多余分支后的 gvd,同时可以观察到障碍物凹处的势场值变连续了。虽然实现了效果,但是这种粗暴简单的做法计算量比较大,实际应用还需要改进数据结构算法。
对于不规则,混乱的障碍物地图,可以通过“膨胀-腐蚀”操作平滑障碍物边缘,过滤噪点。这里就不测试了。



![[Meachines][Hard]FormulaX](https://img-blog.csdnimg.cn/img_convert/0140e0846e52703ce0bf78c09e43e169.jpeg)