

相关文章
一文看懂计算机中的大小端(Endianess)
文章目录 前言一、什么是大小端二、如何判断大小端三、大小端的转换3.1 使用标准库函数3.2 手动实现大小端转换 前言
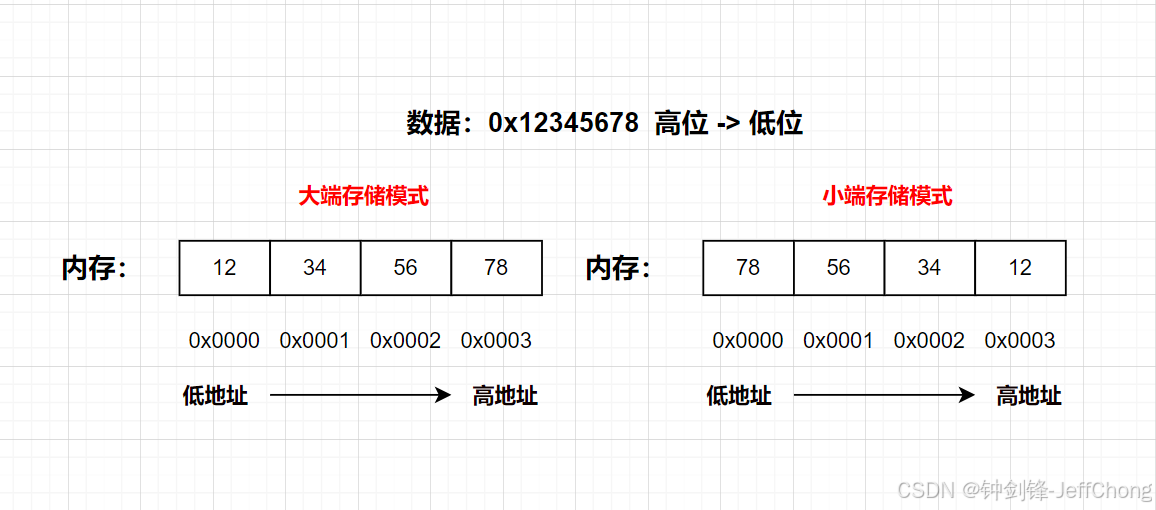
本文主要探讨计算机中大小端的相关概念以及如何进行大小端的判断和转换等。 一、什么是大小端
大小端(Endianess)是指计算机系统在存…

我的第一个AI视频(通义万相)
背景需求:
今天试试通义万相的AI视频功能——免费5秒,
一、文生视频
关键词:一只可爱的小猫咪穿着厨师的服装正在厨房里烤鱼,流口水 大约生成了10分钟,视频是5秒、消耗灵感值5分 20241007星火讯飞视频猫厨师烤鱼 猫…

项目最后优化(十五)
一. wifi连接太慢
void Serial::wifi_Connect(int *flag,const QString &command)
{// 创建 QProcess 对象QProcess *process new QProcess(this); // this 是 Serial 类的实例,继承自 QObject// 设置进程的可执行文件// process->setProgram(command);//…
view deign 和 vue2 合并单元格的方法
1.vue版本和view design 版本
{"vue": "^2.6.11","view-design": "^4.7.0",
}2.Data中定义数据
spanArr: [], // 某一列下需要合并的行数
pos: 0// 索引// 注意点: 在获取列表前,需要重置 this.spanArr [] 注…

【分布式微服务云原生】gRPC与Dubbo:分布式服务通信框架的双雄对决
摘要 在构建分布式系统时,选择合适的服务间通信框架至关重要。gRPC和Dubbo作为两个领先的框架,各自拥有独特的优势和应用场景。本文将深入比较这两个框架,探讨它们的定义、语言支持、接口定义、通信协议、服务治理以及应用场景。通过本文&…

选择网络安全模式启动Windows系统,解决PC无法连接网络问题
目录
1、电脑无法连接网络
2、发现C:\Windows\System32\drivers路径下的很多文件不见了
3、使用360安全卫士中的断网急救箱工具修复,也就解决不了问题
4、重启系统,以网络安全模式启动系统,修复系统网络模块,完美解决问题
5、…
