基于STM32单片机的汽车胎压、速度及状态监测系统设计与实现
摘要:
随着汽车电子技术的快速发展,车辆状态实时监控系统的需求日益增长。本文设计并实现了一种基于STM32单片机的汽车胎压、速度及状态监测系统。该系统能够实时监测汽车的胎压、速度以及其他车辆状态信息,并通过HC-05蓝牙模块将这些数据上传至手机APP,以便驾驶员随时掌握车辆状态,提高行车安全。
关键词:STM32单片机;胎压监测;速度监测;蓝牙通信;车辆状态监控
一、引言
汽车胎压和速度的实时监测对于行车安全至关重要。合理的胎压可以提高行驶的稳定性和燃油经济性,而速度控制则是预防交通事故的关键因素。本文旨在设计一种基于STM32单片机的汽车监控系统,该系统不仅能监控驻车时的落锁、胎压、车窗等功能,还能在行车时监测速度和行驶时间,并通过蓝牙技术将数据实时上传至手机APP,以便驾驶员做出及时的判断和调整。
二、系统总体设计
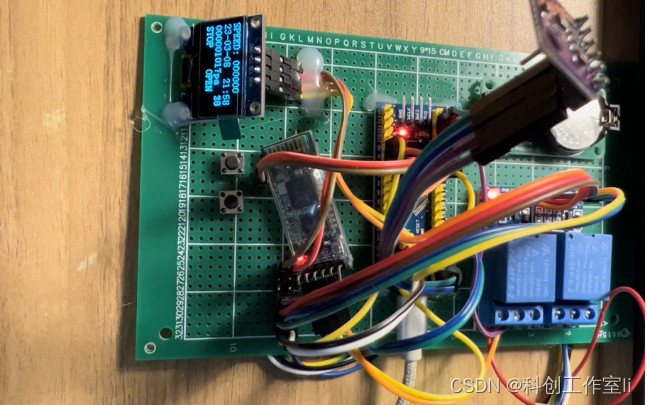
本系统主要由STM32单片机、传感器模块(包括胎压传感器和速度传感器)、电机控制模块、车窗控制模块以及HC-05蓝牙通信模块组成。STM32单片机作为整个系统的核心,负责数据采集、处理以及控制指令的发送。
三、硬件设计
- 胎压监测模块:采用高精度的胎压传感器,实时监测轮胎内部压力,并将数据传输给STM32单片机。
- 速度监测模块:通过车速传感器获取实时车速数据,传输给STM32单片机进行处理。
- 电机与车窗控制模块:STM32单片机根据接收到的指令,控制电机和车窗的开启与关闭。
- 蓝牙通信模块:采用HC-05蓝牙模块,实现与手机APP的无线通信,将数据上传并接收控制指令。
四、软件设计
- 数据采集与处理:STM32单片机通过ADC接口读取传感器的模拟信号,并将其转换为数字信号进行处理。
- 控制逻辑实现:根据采集到的数据,STM32单片机判断是否需要控制电机或车窗的动作,并执行相应的控制指令。
- 蓝牙通信实现:通过串口通信与HC-05蓝牙模块进行数据交换,实现数据的上传和指令的接收。
五、系统测试与实验结果分析
本系统在实验室环境下进行了全面的测试,包括胎压监测、速度监测、电机与车窗控制以及蓝牙通信等功能。测试结果表明,系统能够准确地采集并处理胎压和速度数据,稳定地控制电机和车窗的开启与关闭,并通过蓝牙模块将数据实时上传至手机APP。
六、结论与展望
本文设计了一种基于STM32单片机的汽车胎压、速度及状态监测系统,实现了对汽车胎压、速度的实时监测以及车辆状态的控制与上传功能。该系统具有较高的实用性和可靠性,为驾驶员提供了便捷的车辆状态监控手段。未来可以进一步优化算法和提高数据传输的稳定性,以满足更复杂、更严苛的行车环境需求。
由于篇幅限制,我无法直接给出完整的项目代码,但我可以提供一个简化的框架和部分代码示例,以帮助您开始设计和实现基于STM32单片机的汽车胎压、速度及状态监测系统。
首先,您需要配置STM32的硬件接口以连接胎压传感器、速度传感器、电机控制、车窗控制以及蓝牙模块。这通常涉及GPIO、ADC、UART等外设的配置。
以下是一个简化的代码框架,展示了如何初始化外设、读取传感器数据、处理数据,并通过蓝牙发送数据。
#include "stm32f1xx_hal.h"
#include "sensors.h"
#include "bluetooth.h"
#include "motor_window_control.h" UART_HandleTypeDef huart1; // 假设蓝牙模块连接在USART1上
ADC_HandleTypeDef hadc1; // 假设胎压传感器连接在ADC1上 void SystemClock_Config(void);
void Error_Handler(void);
void MX_USART1_UART_Init(void);
void MX_ADC1_Init(void); int main(void) { HAL_Init(); SystemClock_Config(); MX_USART1_UART_Init(); MX_ADC1_Init(); // 初始化传感器、电机和车窗控制等 Sensors_Init(); MotorWindowControl_Init(); Bluetooth_Init(); float tire_pressure, speed; char data_buffer[64]; while (1) { // 读取胎压数据 tire_pressure = Sensors_ReadTirePressure(); // 读取速度数据,这里假设是通过外部中断或定时器来读取速度传感器的脉冲数 speed = Sensors_ReadSpeed(); // 处理数据,比如判断是否超出阈值等 ProcessData(tire_pressure, speed); // 将数据格式化为字符串,准备发送 sprintf(data_buffer, "Tire Pressure: %.2f kPa, Speed: %.2f km/h", tire_pressure, speed); // 通过蓝牙发送数据 Bluetooth_SendData(data_buffer); // 延时一段时间,或者根据实际需要调整数据发送的频率 HAL_Delay(1000); }
} // 其他初始化函数、数据处理函数、控制函数等需要根据实际硬件和库函数来实现。请注意,上述代码只是一个非常简化的框架,用于指导如何开始编写程序。实际的程序将更复杂,并需要处理各种中断、错误检测和恢复、传感器校准等。
对于具体的传感器读取、电机和车窗控制、蓝牙通信等功能的实现,您需要参考相应的硬件手册和库函数文档来编写详细的代码。
另外,STM32CubeMX工具可以帮助您生成初始化代码和外设配置代码,这可以大大加速开发过程。
由于这是一个复杂的项目,涉及多个硬件组件和通信协议,因此强烈建议您分阶段开发和测试每个部分,确保每个组件都能正常工作,然后再集成整个系统。
为了展开上述简化的代码框架,并将其模块化,我们可以将不同的功能划分到不同的源文件中。以下是一个更详细的模块化代码结构示例:
main.c
#include "main.h"
#include "sensors.h"
#include "bluetooth.h"
#include "motor_window_control.h" UART_HandleTypeDef huart1;
ADC_HandleTypeDef hadc1; int main(void) { HAL_Init(); SystemClock_Config(); MX_USART1_UART_Init(); MX_ADC1_Init(); // 初始化各个模块 Sensors_Init(); MotorWindowControl_Init(); Bluetooth_Init(&huart1); while (1) { float tire_pressure = Sensors_ReadTirePressure(); float speed = Sensors_ReadSpeed(); char data_buffer[64]; sprintf(data_buffer, "{\"tire_pressure\": %.2f, \"speed\": %.2f}", tire_pressure, speed); // 发送数据到手机APP Bluetooth_SendData(&huart1, data_buffer); // 其他逻辑处理,如电机和车窗控制等 HAL_Delay(1000); // 延时1秒 }
} // ... 其他必要的初始化函数和系统配置 ...sensors.h
#ifndef SENSORS_H
#define SENSORS_H void Sensors_Init(void);
float Sensors_ReadTirePressure(void);
float Sensors_ReadSpeed(void); #endif // SENSORS_Hsensors.c
#include "sensors.h"
// 引入必要的HAL库和其他传感器驱动头文件 void Sensors_Init(void) { // 初始化传感器硬件接口和驱动程序
} float Sensors_ReadTirePressure(void) { // 读取胎压传感器的数据,并返回胎压值 float pressure = 0.0f; // 示例值,需要根据实际硬件修改 // ... 读取胎压传感器数据的代码 ... return pressure;
} float Sensors_ReadSpeed(void) { // 读取速度传感器的数据,并返回速度值 float speed = 0.0f; // 示例值,需要根据实际硬件修改 // ... 读取速度传感器数据的代码 ... return speed;
}
![[项目构建] 二次封装统一Axios配置 JSTS两个版本实现取消重复请求,超时重发](/images/no-images.jpg)