












相关文章

浅析服务器虚拟化技术
服务器虚拟化技术是现代信息技术领域的一项重要创新,通过将物理服务器的硬件资源(如CPU、内存、存储和网络)抽象化,实现多个虚拟服务器(虚拟机,VMs)的运行。这种技术不仅提高了资源利用率,还简化了管理流程,降低了成本,并为云计算和大数据发展提供了坚实的基础。以下…

100.3 AI量化面试题:解释配对交易(Pairs Trading)的原理,并说明如何选择配对股票以及设计交易信号
目录 0. 承前1. 配对交易基本原理1.1 什么是配对交易1.2 基本假设 2. 配对选择方法2.1 相关性分析2.2 协整性检验 3. 价差计算方法3.1 简单价格比率3.2 回归系数法 4. 交易信号设计4.1 标准差方法4.2 动态阈值方法 5. 风险管理5.1 止损设计5.2 仓位管理 6. 策略评估6.1 回测框架…
浏览器同源策略:从“源”到安全限制的全面解析
一、什么是“源”(Origin)?
在浏览器中,“源”是 Web 安全的核心概念。一个“源”由三部分组成: 协议(Protocol):如 http://、https://、ftp:// 域名(Host)…
GPIO配置通用输出,推挽输出,开漏输出的作用,以及输出上下拉起到的作用
通用输出说明:
①输出原理:
对输出数据寄存器的对应位写0 或 1,就可以控制对应编号的IO口输出低/高电平
②输出类型
推挽输出:IO口可以输出高电平,也可以输出低电平
开漏输出:IO口只能输出低电平 所以…

【Linux系统】计算机世界的基石:冯诺依曼架构与操作系统设计
文章目录 一.冯诺依曼体系结构1.1 为什么体系结构中要存在内存?1.2 冯诺依曼瓶颈 二.操作系统2.1 设计目的2.2 系统调用与库函数 一.冯诺依曼体系结构
冯诺依曼体系结构(Von Neumann Architecture)是计算机的基本设计理念之一,由…
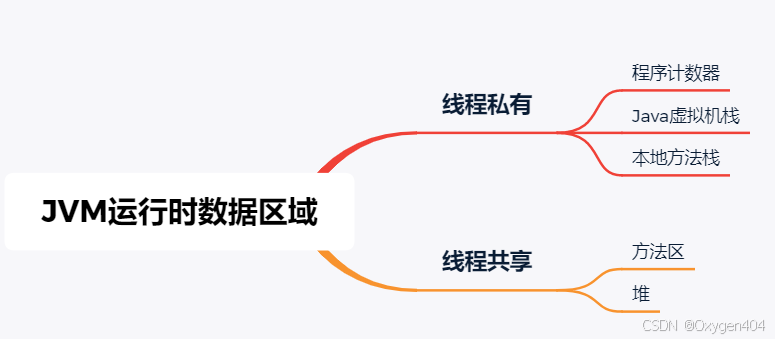
JVM运行时数据区域-附面试题
Java虚拟机在执行Java程序的过程中会把它所管理的内存划分为若干个不同的数据区域。这些区域
有各自的用途,以及创建和销毁的时间,有的区域随着虚拟机进程的启动而一直存在,有些区域则是
依赖用户线程的启动和结束而建立和销毁。 1. 程序计…

vector容器(详解)
本文最后是模拟实现全部讲解,文章穿插有彩色字体,是我总结的技巧和关键 1.vector的介绍及使用
1.1 vector的介绍
https://cplusplus.com/reference/vector/vector/(vector的介绍)
了解 1. vector是表示可变大小数组的序列容器。…
为什么“记住密码”适合持久化?
✅ 特性 1:应用重启后仍需生效
记住密码的本质是长期存储用户的登录凭证(如用户名、密码、JWT Token),即使用户关闭应用、重启设备,仍然可以自动登录。持久化存储方案: React Native 推荐使用 AsyncStorag…