一、添加机器人选配包
Fanuc机器人要进行socket通讯,需要有机器人通讯的选配包,1A05B-2600-R648 User Socket Msg,1A05B-2600-R632 KAREL,1A05B-2600-R566 KAREL Diagnostic,1A05B-2600-J971 KAREL Use Sprt FCTN。
二、FANUC机器人通讯配置
将fanuc机器人keral变量打开,才能使用keral程序进行SOCKET通讯。

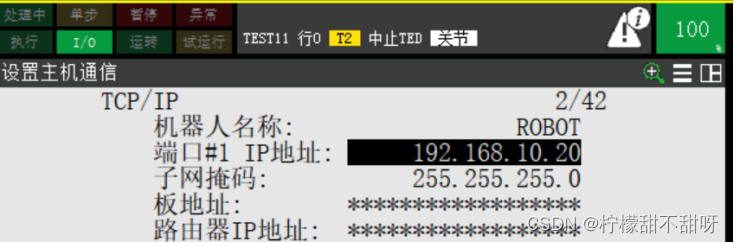
打开设置中的主机通讯选项,进行机器人的IP地址的更改。
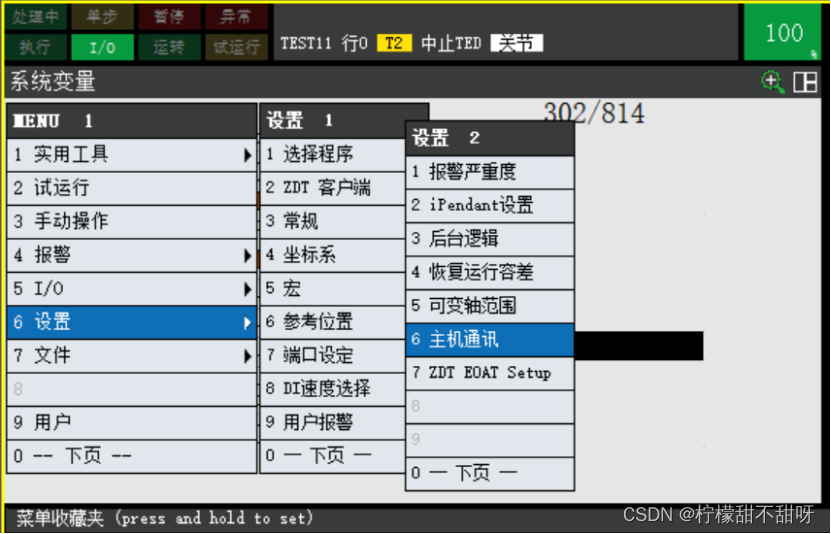
点击详情进入编辑页面。
将端口1的ip地址改成192.168.10.20。
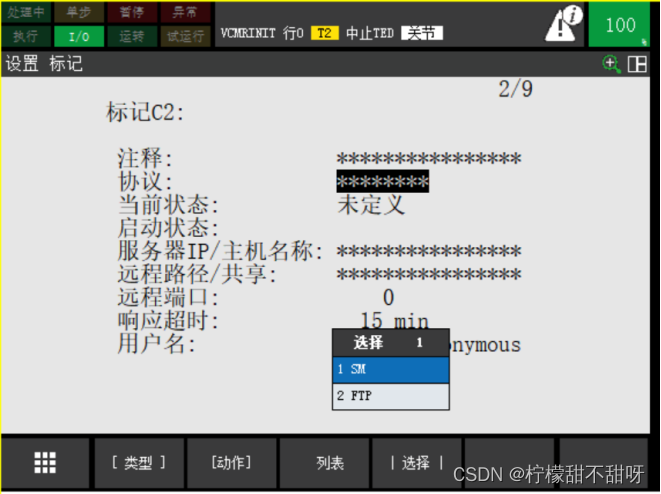
三、机器人作为客户端设置
在主机通讯页面点击显示,选择其中客户端选项,对C2端口进行定义。
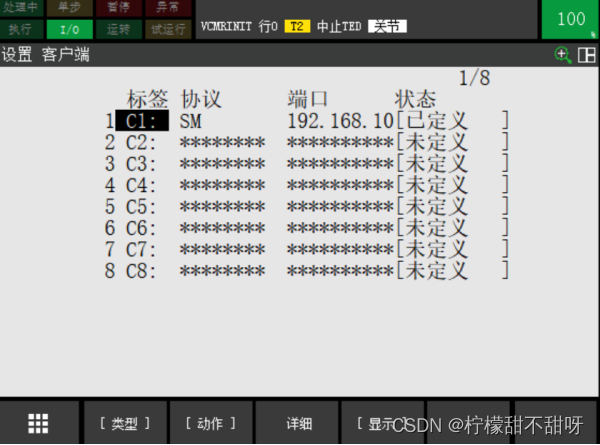
协议选择SM协议。
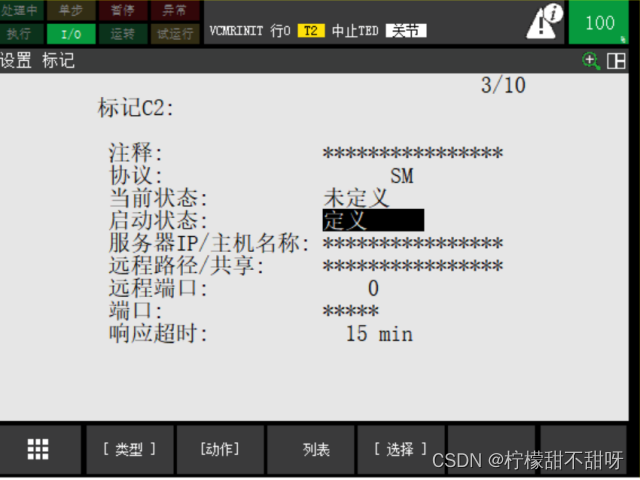
定义启动状态。
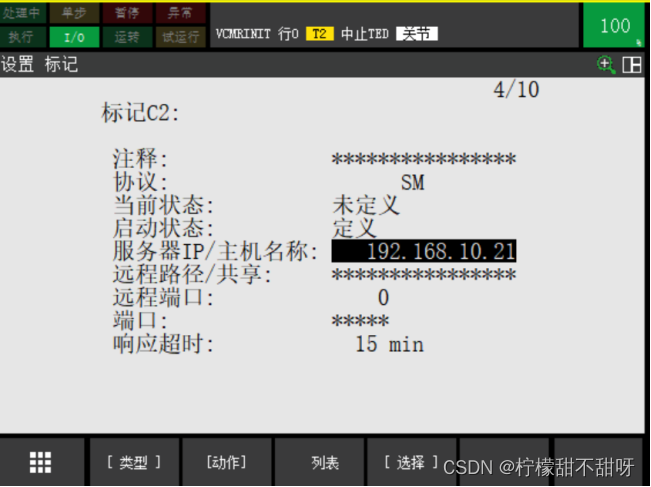
注意TCP/IP的地址与机器人IP地址不同,进行地址的分配。
对动作进行定义
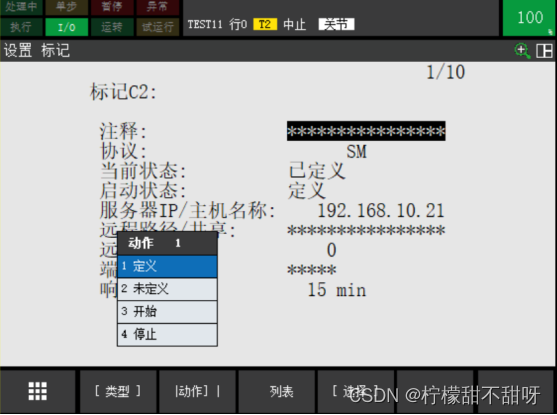
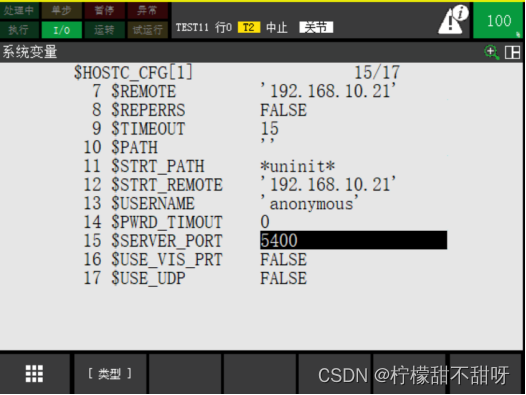
设置的端口号,在变量中找到下图所示的变量名称
将端口号设置为5400,设置完成后续重启控制柜